| Date: | 1st December 2018 |
| Location: | Whalan Reserve, Australia |
| Conditions: | Clear, wind 0-10km, 28C |
| Members: | PK and GK |
Today we revisited launching flour rockets just for the fun of it as it has been a while since the last time we launched them. We used the Axion III rocket for this in order to keep down the amount of flour that's needed per launch.
We flew this rocket off the pad first while it was still dry. One of the problems of flying flour rockets is that they leave a nice mess on the ground. If you then introduce water to it, you essentially turn it into glue which makes it a little harder to clean off equipment.
The rocket was pressurised to 120psi and launched. It left a nice cloud behind and the rocket flew really well. The parachute opened right near apogee and the rocket landed well.
Since we still had flour left over, we set the rocket up and flew it a second time. Again the rocket left a nice plume on the way up and you could here a pop as the flour ran out.
It was quite intriguing to see how well the flour/powder comes out of the small nozzle, and that no flour was left in the rocket. We had suspected that what is happening is that as the pressure drops inside the rocket suddenly during launch the high pressure air between all the flour particles starts pushing them apart essentially aerating them and allowing them to move a lot more freely and so behaving more like a liquid.
To see if this is what was happening we set up an experiment where we half filled a bottle with flour with the nozzle pointing up and then pressurised it to 100psi. We then released the nozzle and saw that in fact all the flour very quickly aerated itself and a good deal of flour was ejected from the nozzle vertically.
We repeated this experiment again at 90psi, and observed exactly the same behaviour.
But in a rocket this is reversed with the flour near the nozzle at the bottom of the rocket and the compressed air above the flour. So we set up the experiment again and this time we mounted the bottle upside down and pressurised it to 100psi from the bottom. We repeated the experiment for a second time to confirm the results.
Please see the video below for details of the experiment:
Here are some photos from the day.




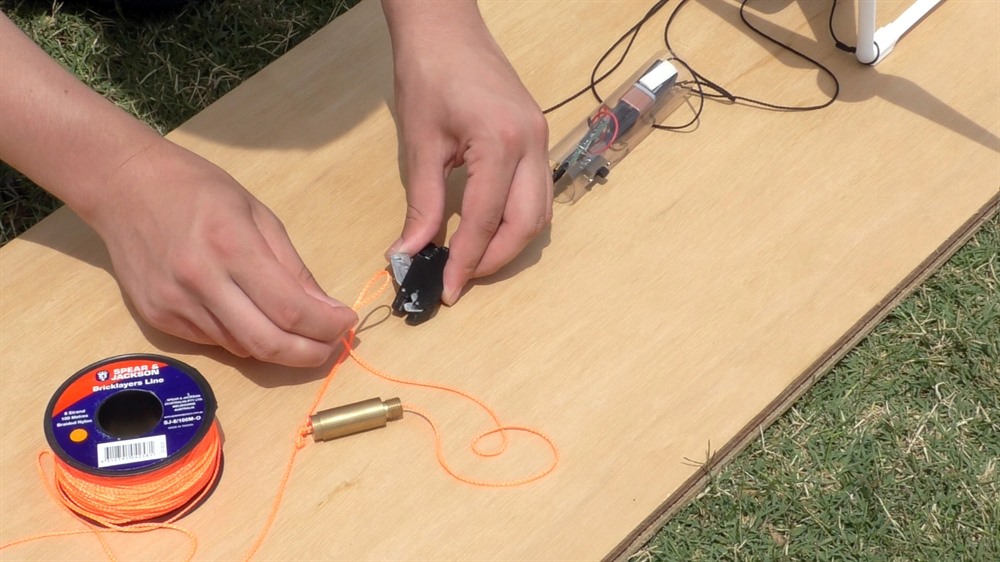
We also did some filming on the day of the shock cord release mechanism. This is a mechanism that is able to withstand the load of a shock cord when opening a parachute, but is able to easily release the shock cord after 10 minutes of hanging in a tree.
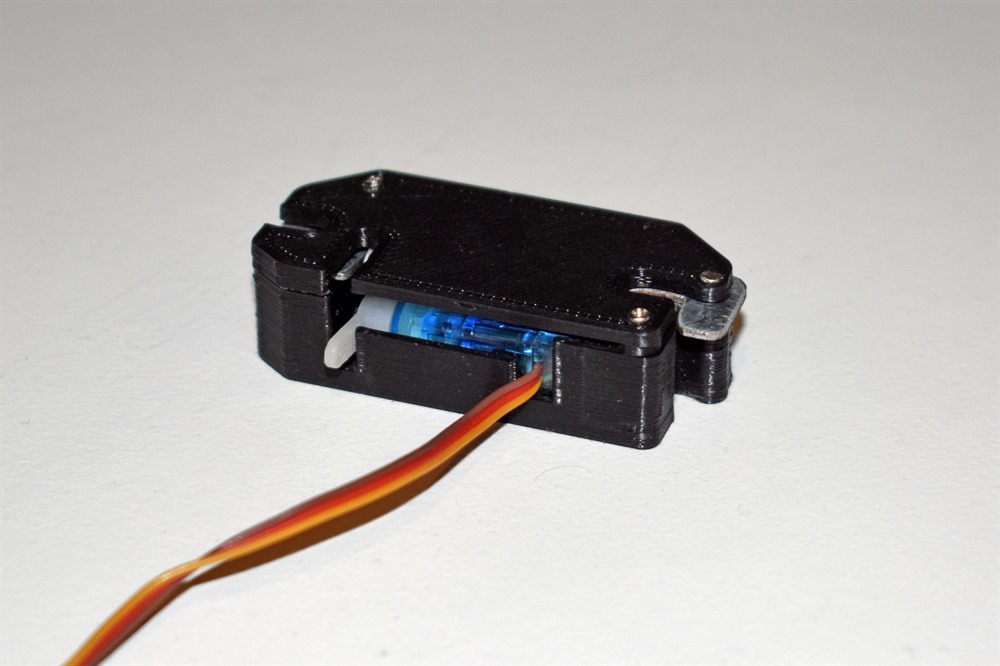
This is the next iteration of the Detmech we made a few years ago. We wanted a more self contained unit, and something that could be moved from rocket to rocket.
The timer could be set for anything but we figured that 10 minutes after launch is a good compromise because it makes sure the rocket has landed but you have enough time to get under it and catch it when it does release. If you increase the delay it means that there is more chance of the rocket getting even more tangled where it is if you have windy conditions.
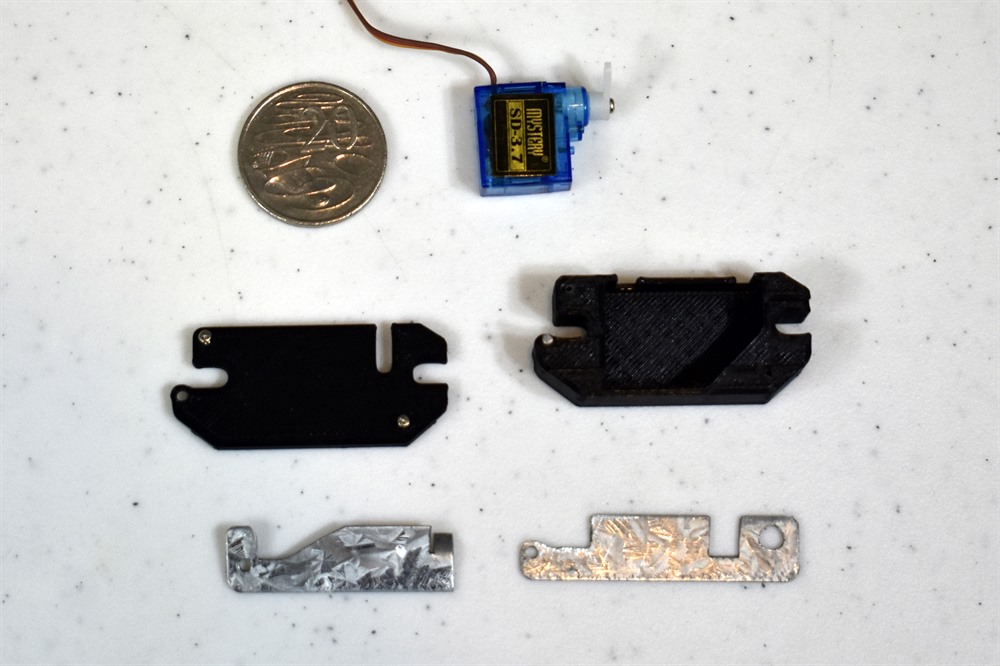
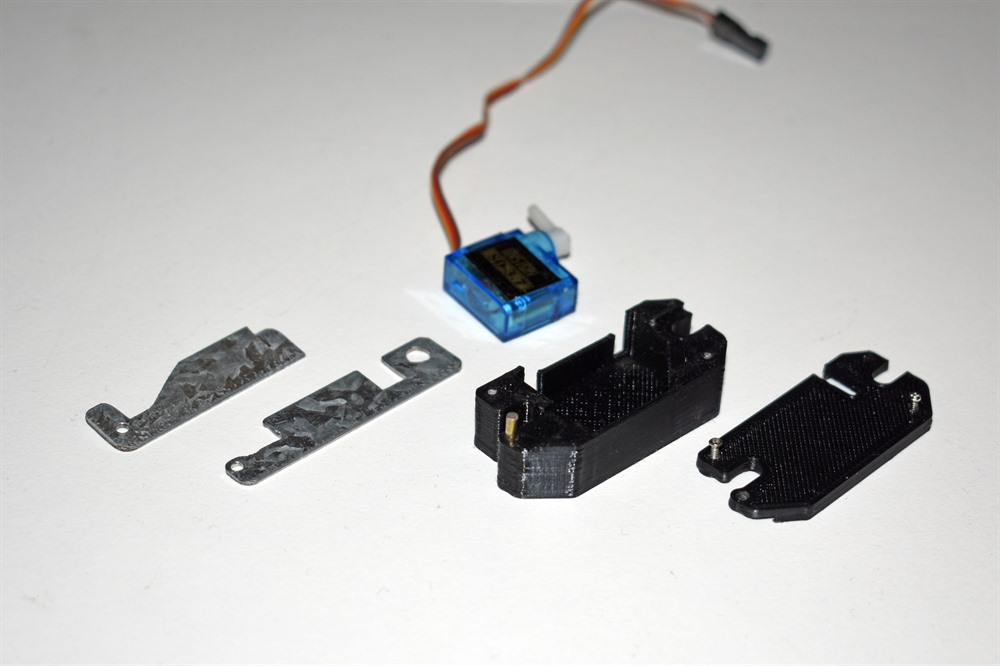
The design is based around a small 3.7g sub micro servo to keep weight to a minimum. The body of the mechanism is 3D printed in two pieces. The main body houses the servo, and then is capped with the lid. Internally are two metal plates. The backing plate holds the load across the body, and the second is a movable lever that is held closed by the servo. A steel pin transfers the load between the backing plate and the lever.
We didn't want to base the mechanism on a pyro charge, or hot wire cutting the cord as the last thing you want is something igniting in the tops of trees. The servo also lets you test the mechanism as many times as you like without using up consumables.
We went through a number of iterations of the body design to make everything fit.

We put the shock release in our test stand to see how much force can be applied before it releases. The mechanism held up to 8Kg before the lever pushed the servo horn out of the way. This was done while the servo was off so there was no position holding force applied by the servo motor on the servo horn.
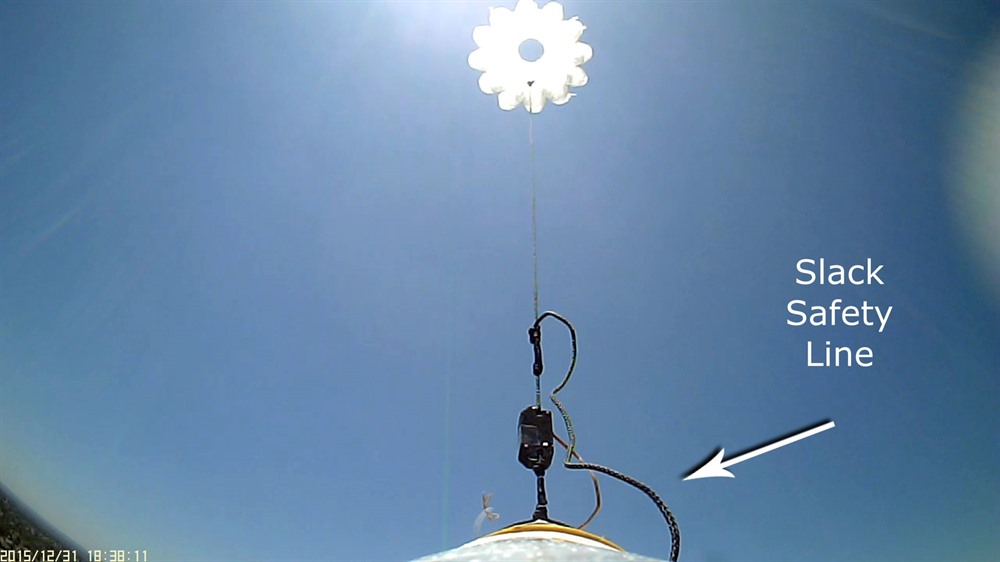
We fitted the mechanism to a rocket but left it powered off as we wanted to see if it will be able to hold the shock loads during parachute deployment and then the forces while descending under parachute. We put a slack safety line between the rocket and the parachute just in case the mechanism released or broke. We also had a camera placed on the rocket so that we could observe the mechanism during flight. The test was successful and the mechanism was able to hold the parachute shock cord just fine.










The mechanism doesn't just need to be used on a rocket. You can use it in other applications such as on a drone. You can for example use it to deliver a recovery line over the top of a branch that a rocket is stuck in. This is more accurate than trying to throw the line over. There are plenty of examples of drones being used to cast a fishing lines.


You can also use it to deliver payloads by drone and drop them over an area without landing the drone.
It's very unlikely that we would use this mechanism on every flight, but we would be able to attach it if there is a higher likelihood of the rocket getting stuck. If for example the wind is blowing the wrong way, or where there are more trees.
| Launch | Details | ||||||||||||||||||||||||
| 1 |
|
||||||||||||||||||||||||
| 2 |
|
||||||||||||||||||||||||
| 3 |
|
||||||||||||||||||||||||
| 4 |
|