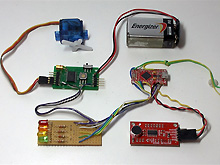
The Servo Timer II was primarily designed for parachute deployment on water rockets, but can be used for other applications. The timer controls a single RC servo motor that can open a latch on a parachute door.
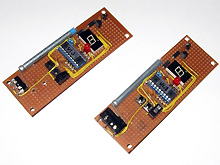
This flight computer (FC) was designed primarily to provide timing for parachute deployment and staging of multistage water rockets. The FC can drive one or two standard RC servomotors that are used to release latches on recovery systems.
This fifth iteration of the flight computer (FC) was designed primarily to provide timing for parachute deployment and staging of multistage water rockets.
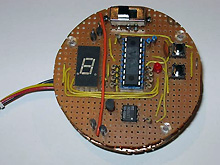
Version 1.4 of the flight computer extends the functionality of V1.3.1. It has been designed specifically to work with a booster in a two stage rocket. It controls two RC servo actuators.
V1.3 is the next iteration of our water rocket flight computer. While in general retaining the same functionality as V1.2.
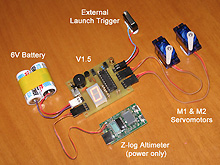
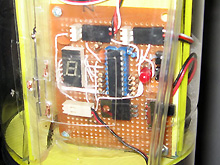
This version of the FC was intended to test the ability of the system to function at water rocket type G forces and to test the entire system from launch detect, parachute deployment to the recovery phase.
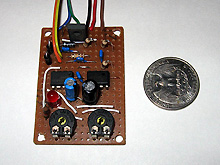
The deployment timer is intended to be used on water rockets to provide a delay after launch to release the parachute. The design is based on a simple two stage timer.
This detector uses the sound of air rushing past the rocket to determine when it reaches apogee.
A circuit for amplifying the signal from a test stand load cell so that it can be captured by a data logger.