V1.3 is the next iteration of our water rocket flight
computer. While in general retaining the same functionality as
V1.2 the following changes have been made:
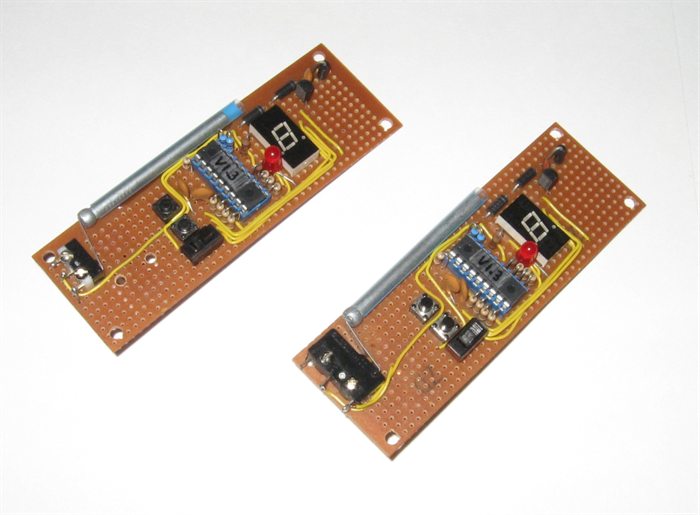
- Single rectangular board design. This makes it simpler for
manufacture and mounting.
- Single power supply. The processor and actuator run from a
single 6V battery now.
- Modified launch detect switch.
- Opto-coupler has been removed
- Larger higher brightness "Armed" LED to make it easier to
see in daylight.
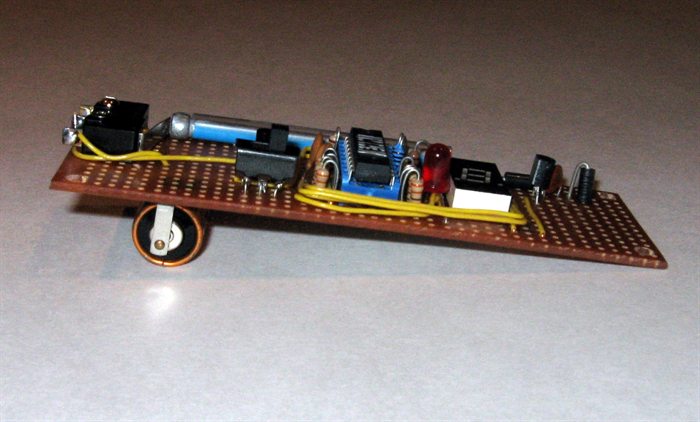
- Reduced overall weight. ( 37 g - including battery )
- Battery attached to the PCB.
- Actuator moved to the release mechanism.
- Designed to be mounted in 90mm as well as 110mm diameter
rocket bodies.
Design
The design changes were primarily chosen to improve weight of
the system. The majority of weight savings were due to having a
single board design, switching to single battery operation and
mounting the battery directly on the PCB. Other small weight
improvements included the use of smaller components.
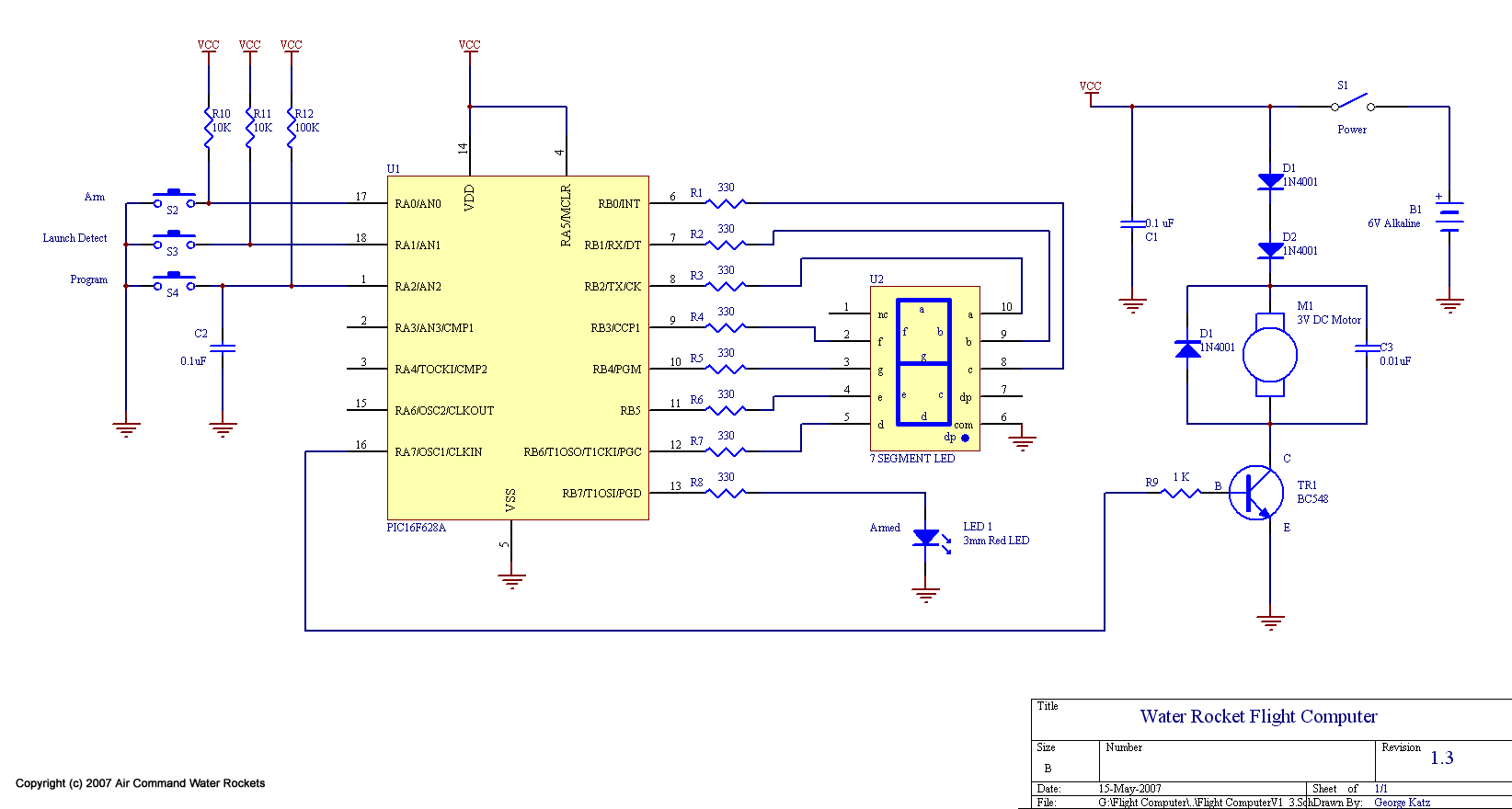
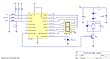
The opto-coupler has been removed and the micro-controller
directly drives the actuator transistor. A snubber diode has
been added across the motor as well as a small capacitor to
reduce noise. A capacitor has also been added across the
micro-controller's power rails.
The software changes included disabling the brown-out reset
on the micro-controller to prevent it from resetting when there
was a bit of noise on the power rails. The "P" display during
parachute deployment has been replaced with a "-" to reduce the
amount of power drawn from the battery while the motor is in
operation.
The launch detect switch is a smaller micro-switch and is
activated by a large nail that slides within a guide. This helps
prevent unnecessary shocks on the armature during landing. With
the weight glued to the armature in V1.2 it was possible for the
armature to pop out of the switch on landing. The new
arrangement is also more compact.
The "power", "program" and "arm" switches have all been
placed close together to allow them to be accessible from a much
smaller hole in the rocket body. This helps streamline the
rocket reducing drag.
Due to upcoming experiments the range of selectable
delays has also been increased. The following table gives the
range of delays settable with version 1.3.
| LED Display |
Deploy Delay
(Seconds) |
| 0 |
3 |
| 1 |
3.25 |
| 2 |
3.5 |
| 3 |
3.75 |
| 4 |
4 |
| 5 |
4.25 |
| 6 |
4.5 |
| 7 |
4.75 |
| 8 |
5 |
| 9 |
5.25 |
| A |
5.5 |
| b |
5.75 |
| C |
6 |
| d |
6.25 |
| E |
6.5 |
| F |
6.75 |
| G |
7 |
| h |
7.25 |
| i |
7.5 |
| J |
7.75 |
| k |
8 |
| L |
8.25 |
| m |
8.5 |
| n |
8.75 |
| o |
9 |
| P |
9.25 |
| q |
9.5 |
| r |
9.75 |
| S |
10 |
| t |
10.25 |
| U |
10.5 |
| v |
10.75 |
| w |
11 |
Operation
Operation is identical to that of version 1.2. Refer to
this
section for more details.
Software
The assembly source code can be found here:
Flight1_3.asm
The assembled HEX code can be found here:
Flight1_3.HEX |