| Date: | 27th August 2016 |
| Location: | Whalan Reserve, Australia |
| Conditions: | Clear skies, calm,, 18C |
| Members: | PK, GK and John K |
For L1ght Shadow we decided to use a barometric altimeter to deploy the parachute as this rocket was going to be flown in a variety of ways and this was the easiest option. We chose the StratoLogger CF from PerfectFlite because it is nice and small, records the entire flight and is relatively inexpensive. It has dual pyro outputs for firing ejection charges for drogue at apogee and main at a certain altitude. We are using the drogue output to trigger the Servo Timer II to release the parachute.
There was one small problem though as the StratoLogger continuously does a continuity check on the drogue ejection charge channel. Because the ST II input uses an opto-coupler for its input isolation this would have continuously triggered the timer rather than only at apogee. A quick email to PerfectFlite tech support and they promptly replied with an easy fix. All we had to do was to put a 220 Ohm resistor across the output which would allow the StratoLogger to pass it's continuity check but would produce a voltage low enough that it wouldn't trigger the timer during the continuity check. Once we did that it worked fine. The software that comes with the StratoLogger allows you to control the StratoLogger's outputs so it makes it a breeze to test.
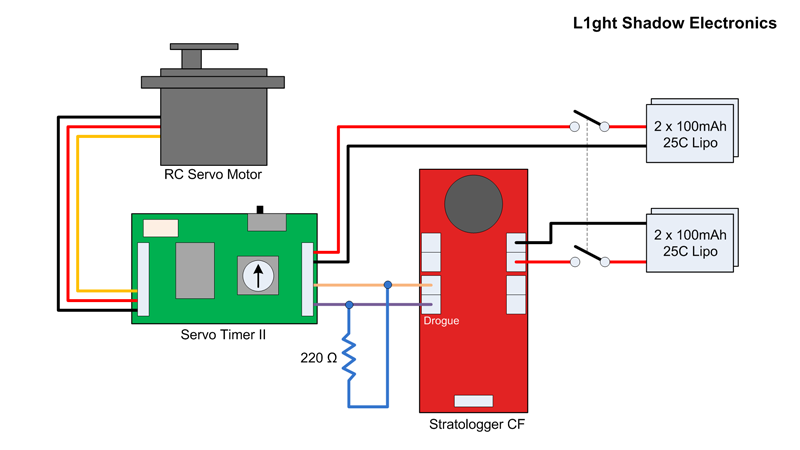

We run two separate batteries, one for the ServoTimer II and servo motor and one for the StratoLogger itself. We wanted to make sure that the StratoLogger's power was nice and clean, with the servo motor potentially creating noise on the power supply when under load. A single DPDT switch turns on both batteries.
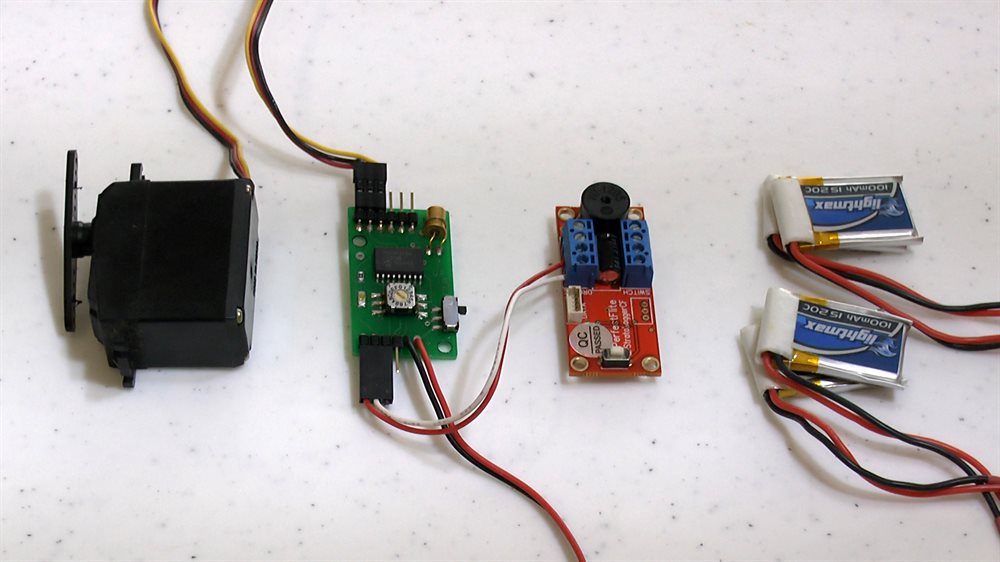
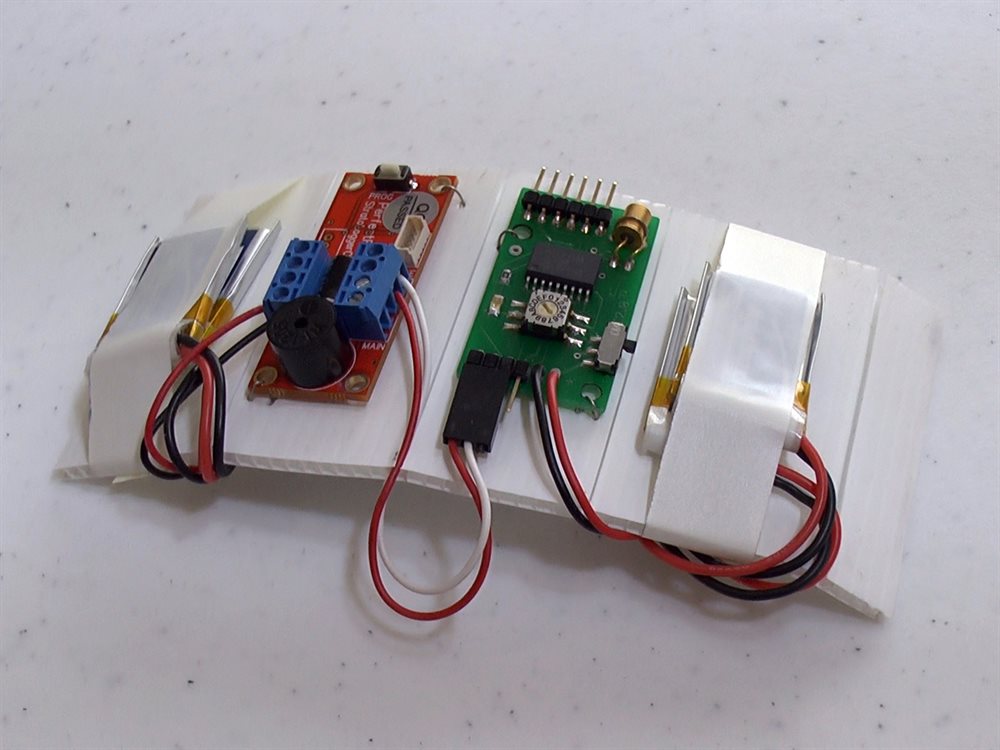
Before flying the new electronics on L1ght Shadow we decided to test it in-flight first on a water rocket. We attached the StratoLogger CF, batteries and Servo Timer II to a piece of corriflute and fitted it inside the rocket's fairing. This way it would be protected in case of a crash. We then attached a servo motor to the outside and mounted a camera just above that. This way we could watch the servo move in relation to the horizon to see how well the setup was responding to detecting apogee. Actual deployment was being controlled by another Servo Timer II in the nosecone.


We flew two pretty identical flights and when reviewing the video after each launch we noticed that the servo activation was really late. Reviewing the data from the StratoLogger it showed that it was really noisy with large spikes in both flights. A closer look at the ascent showed that there were 4 spikes at fairly regular intervals, so we counted the number of revolutions in the video and there were also four. This confirmed our early suspicions that sunlight may have been hitting the barometric sensor. Although the barometric sensor is under the board, sunlight was still get in under it through the clear fairing.
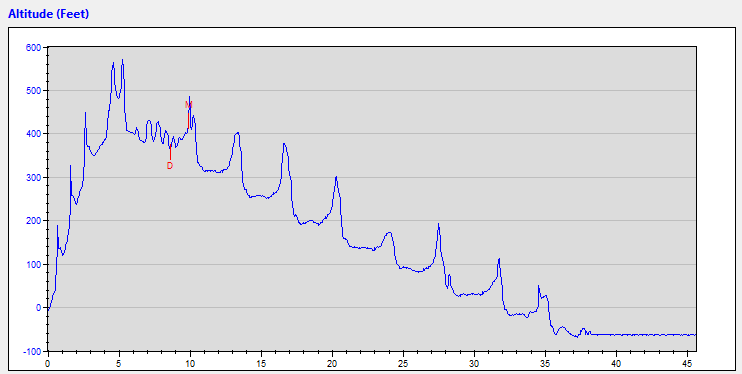
Data from 1st Flight
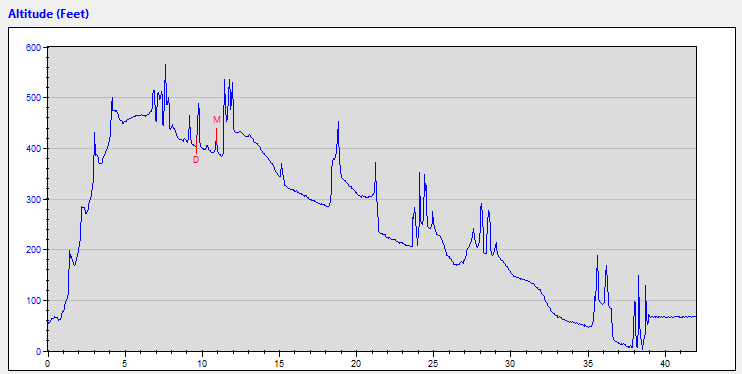
Data from 2nd Flight








For flight 3 we covered the fairing with black electrical tape to provide a sun shield and launched it again. This time the data was good and the video also showed that the servo motor activated right at apogee. Landing was a little sub optimal as the rocket landed in a tree. Luckily it was only a small tree and the parachute was easy to reach so we pulled the rocket off that way.
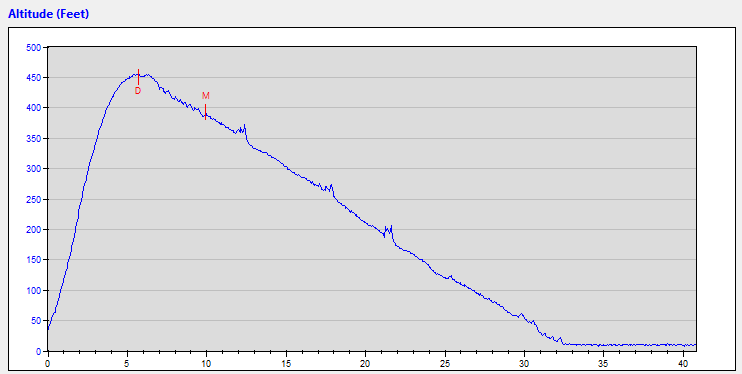
Data from 3rd Flight
So we were happy with the performance of the setup and it was ready to fly on the L1ght Shadow rocket.






| Launch | Details | ||||||||||||||||||||||||
| 1 |
|
||||||||||||||||||||||||
| 2 |
|
||||||||||||||||||||||||
| 3 |
|
||||||||||||||||||||||||
| 5 |
|
||||||||||||||||||||||||
| 6 |
|