| Date: | 26th August 2023 |
| Location: | Whalan Reserve, Australia |
| Conditions: | calm winds, 20C Mostly sunny |
| Members: | GK, PK |
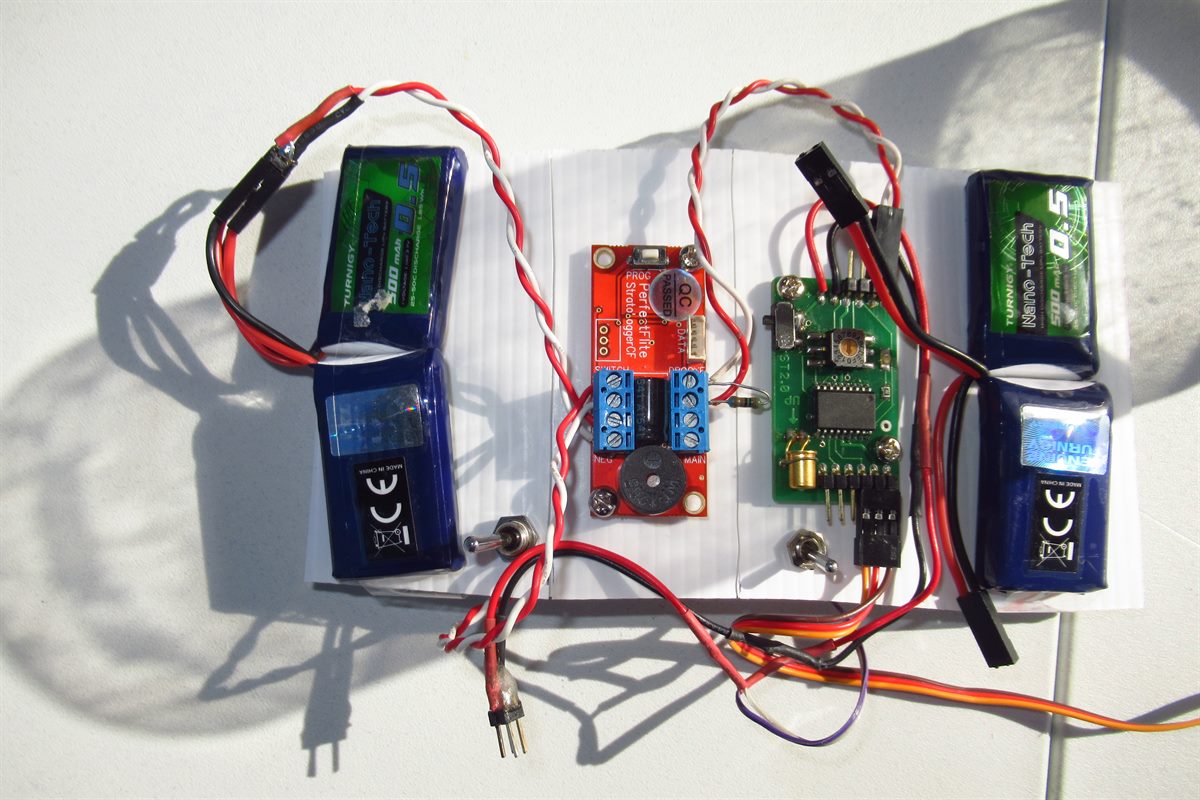
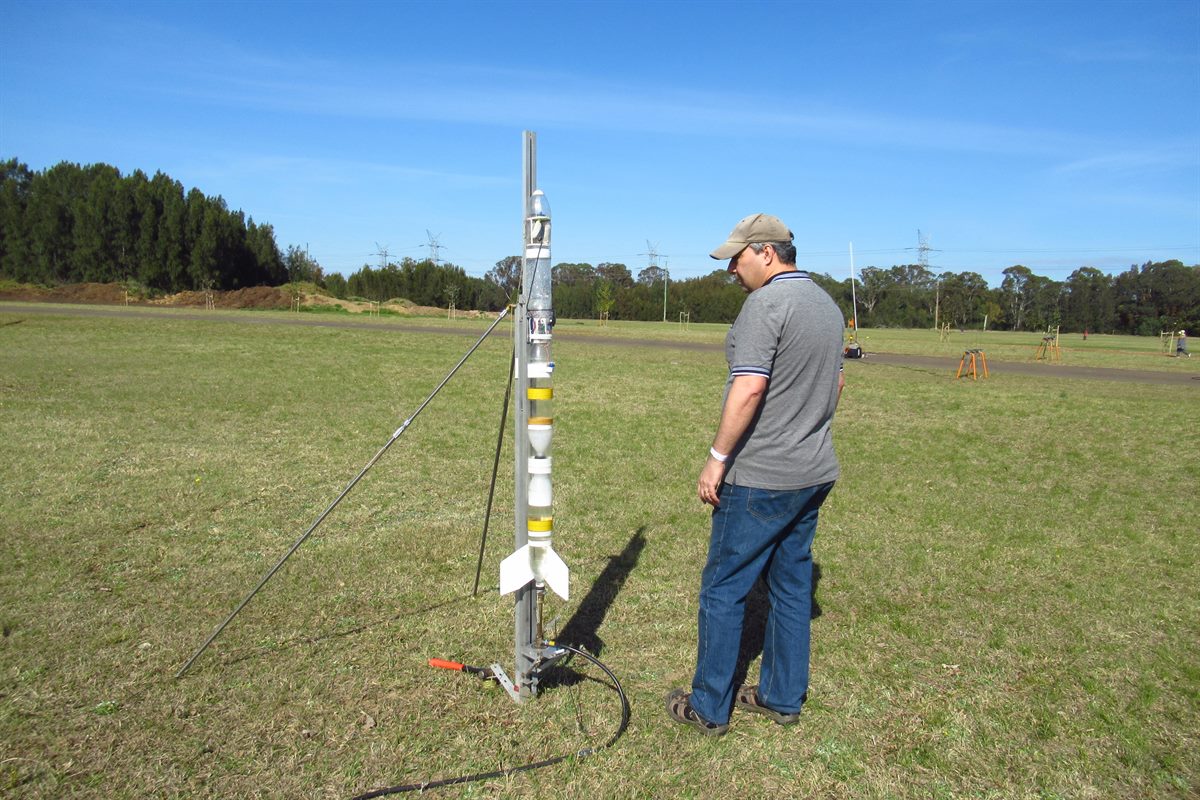
Today we wanted to test the electronics for our Tajfun 2 Level2 rocket before flying them next month. When Tajfun 2 was flown as a water rocket we just used a timer as the rocket was going to be going fairly slow at the time of deployment. But when we fly it on the J motor the rocket will be travelling much faster and so we want to make sure we deploy at apogee. We have opted for just a single stage deploy rather than dual deploy just to make things a little simpler. For apogee detection we are using the Stratologger CF altimeter that we have used previously. This then triggers the servo timer with 0 delay to activate the deployment mechanism. In order to verify that the servo was being activated at the right time, we mounted the servo motor on the outside of the rocket, and then we pointed one of our cameras right at it. That way we would see the horizon and see when the rocket reached apogee and when the servo would activate.
All the electronics were mounted inside a fairing on a piece of corriflute. The whole thing was attached with a pair of cable ties to the fairing.
We put the test on our regular water rocket and pressurised it to 110psi and launched it. The flight was nominal but the rocket had drifted over to the creek and landed right in the grass in the creek bed. Luckily the creek had very little water in it and so the rocket didn't get wet.
Here is the plot from the altimeter.
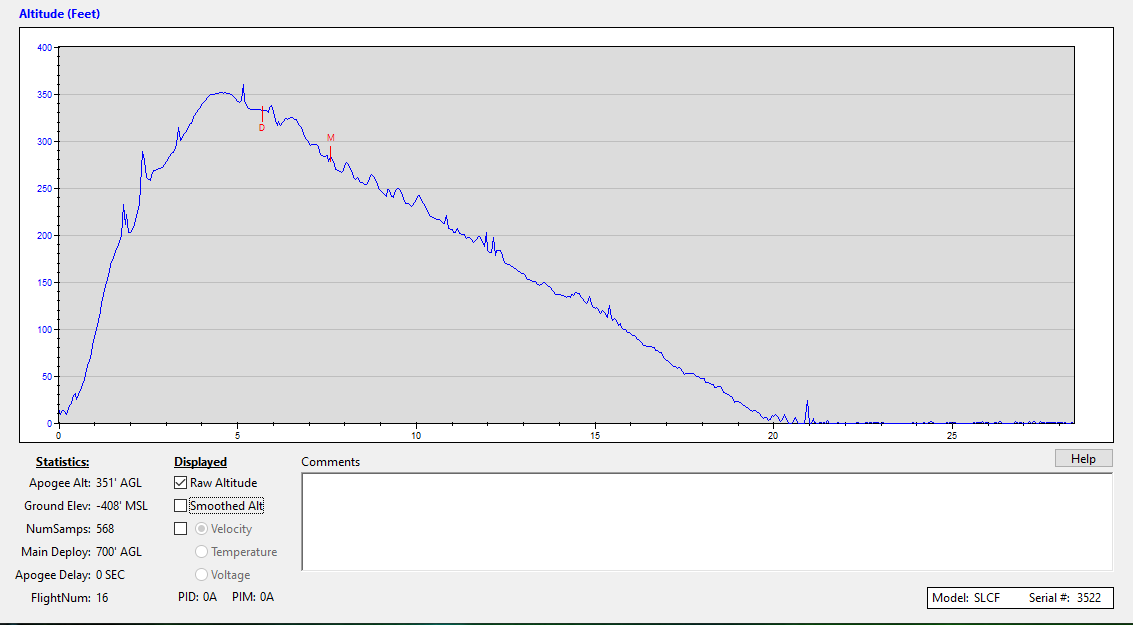
The data is quite noisy with spikes, but we know this is due to the sun shining on the altimeter through the clear fairing, and this shouldn't be an issue once it is mounted inside the nosecone.










Since we had plenty of time, we removed the test electronics, extended the rocket by another spliced pair of bottles and filled it with 1.8Liters of water and shampoo. We launched this rocket just for fun as it's always a fun one to do for the visitors. The rocket again had a nominal flight and landed well.
Robin from UTS approached me a couple of weeks ago if I could help them do some pressure tests on their Nitrous fill hardware for their hybrid that they are building. I went over to his house and we did a number of experiments. Because we were going to be testing the components to 1500psi we decided to use our high pressure Horizon launcher as it has all the connections in place with gauges and could easily handle the pressures. We found quite a few leaks, some of which we could resolve while others we could not on the day. So we agreed to meet a week later at the club launch and re-test the hardware after Robin made the necessary fixes.


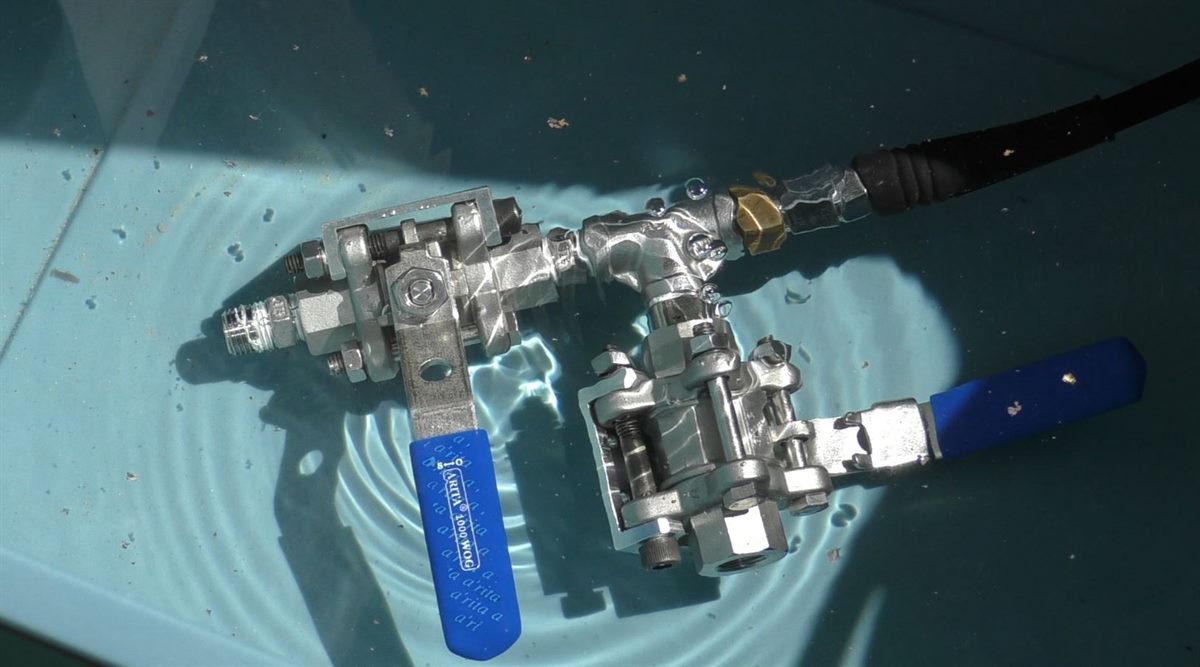



This week we took the test equipment to Whalan reserve and did the tests again. After a few more leaks were fixed we were able to finally do the tests. He was also able to verify that the remotely servo operated ball valves were able to open and close as needed at full pressure. Here are some photos from the test this weekend:





A couple of weeks ago I also finally got my pyrotechnician's license so I can handle and transport the bigger motors now. I was finally able to pick up my J360 motor along with the 54mm casing. This is what we plan to fly Tajfun 2 in just over a month. We've got a few videos to catch up on the development of the Tajfun 2 rocket so we'll try to get some of those done in the next few weeks.



| Launch | Details | ||||||||||||||||||||||||
| 1 |
|
||||||||||||||||||||||||
| 2 |
|