Each flight log entry usually
represents a launch or test day, and describes the
events that took place.
Click on an image to view a larger image, and
click the
browser's BACK button to return back to the
page.
Day 45 -
Zero-G Experiments, Altimeter Flights, Pressure
Switch
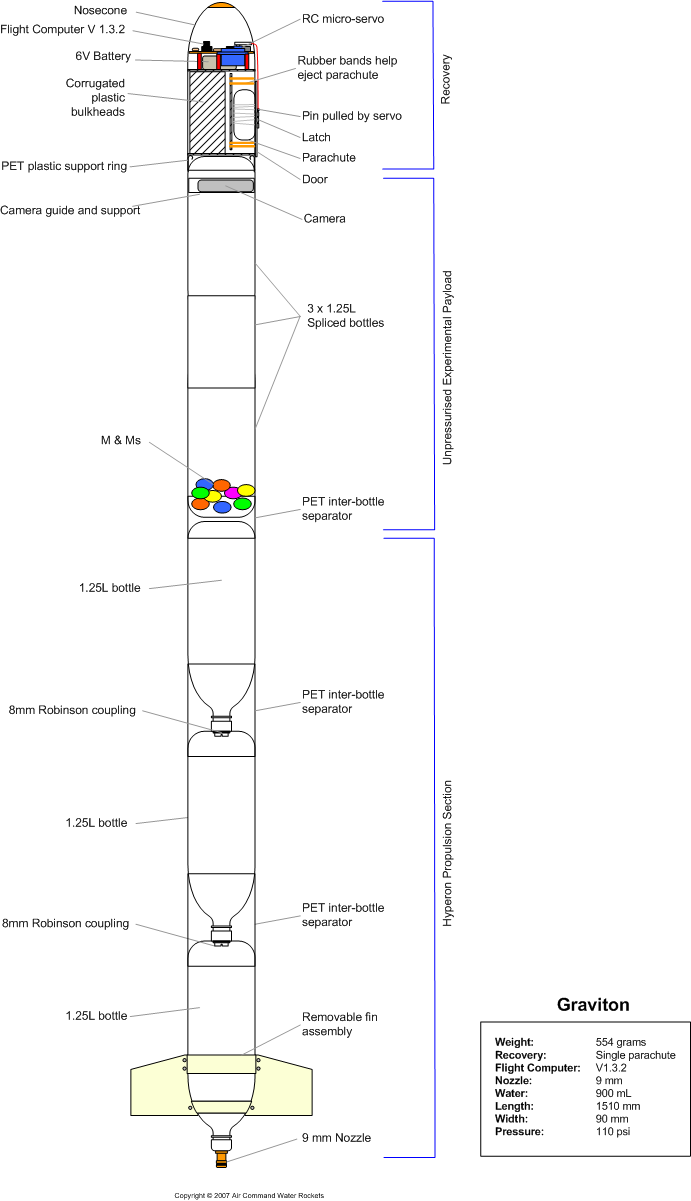
Detailed diagram of the Graviton rocket and
where the payload is located.
Testing the focal length of the on board
camera. We decided we didn't need an extra lens.
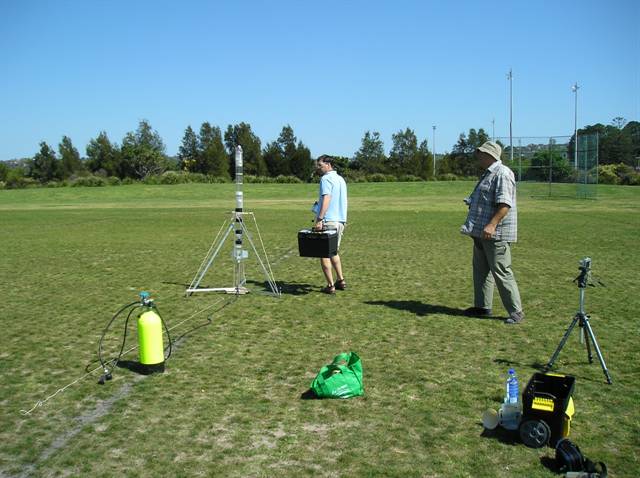
Two new birds ready to fly. Graviton on the
Left, J4 IIIb on the right.
Setting the rocket up for its first flight.
You can see the M&Ms in the bottom of the
payload.
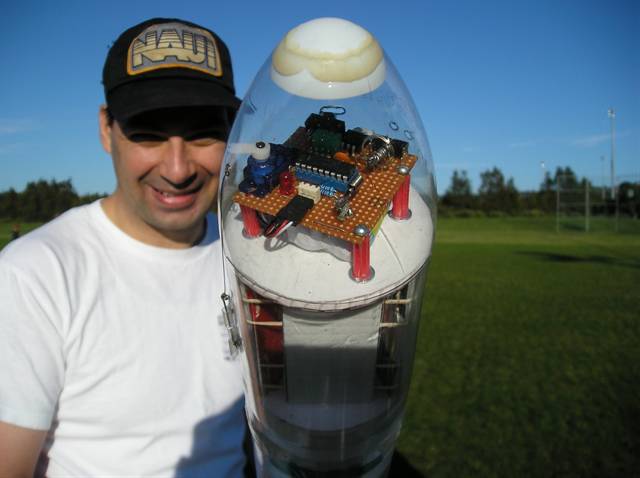
The top of the payload contains the camera
which slides out.
More details of the Graviton payload
The flight computer is set to deploy the
parachute late.
Loading the rocket into the launcher.
Graviton reaches maximum acceleration.
First view of M&Ms starting to float around
the payload section.
Rockets undergoing post flight damage
assessment.
Day 2 - back to launch Graviton after damage
from the previous day.
Filling with 900mL of water.
Loading Graviton into the launcher.
Setting the delay 0.5 second earlier than
previously
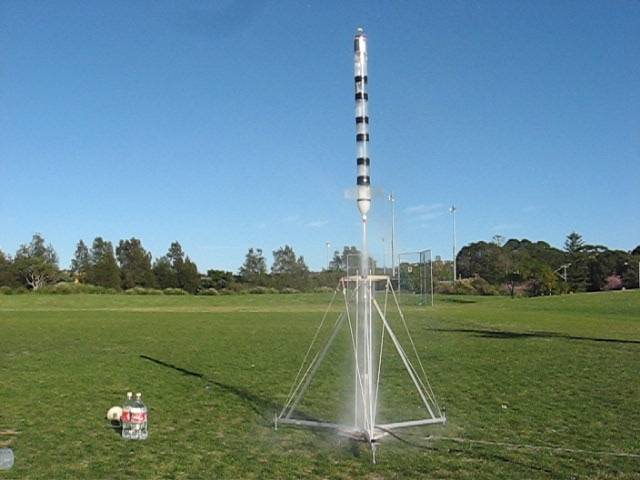
The only way is up.
The rocket on the launcher is too tall to
reach the flight computer.
Another view of the payload. The rocket had
a bit of spin and the M&Ms ended up being forced
to one side.
Graviton descending under parachute.
View from the last flight of the day.
High speed return to Earth with parachute
deployed just above the ground.
View of the deployed parachute from inside
the rocket. All the M&Ms are behind the camera.
Coming in for a soft landing.
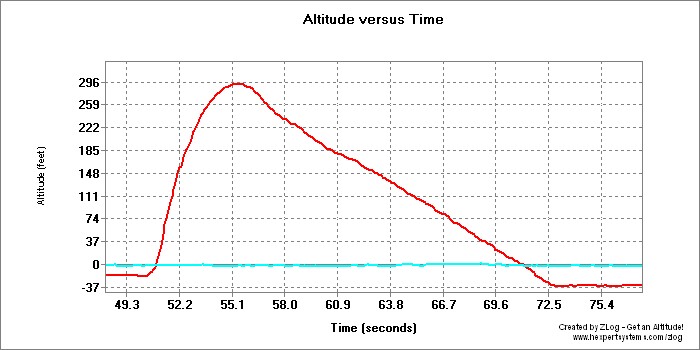
J4 IIIb on its first altimeter flight. This
rocket used water only.
The corresponding altimeter data.
321 feet ( 98 m )
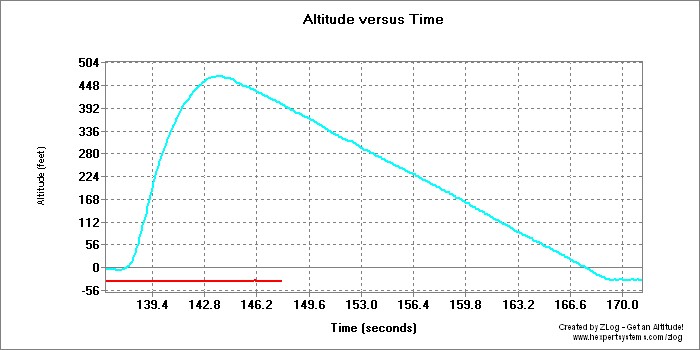
J4 IIIb on its second altimeter flight. This
rocket used 10 psi more and foam.
A different launch picture of the same
flight.
A great long foam trail of the high altitude
foam flight.
The corresponding altitude graph. 483 feet. ( 147 m )
The rocket drifted so far down range that it
went over the river and two rows of trees. It
landed just on the other side of the fence.
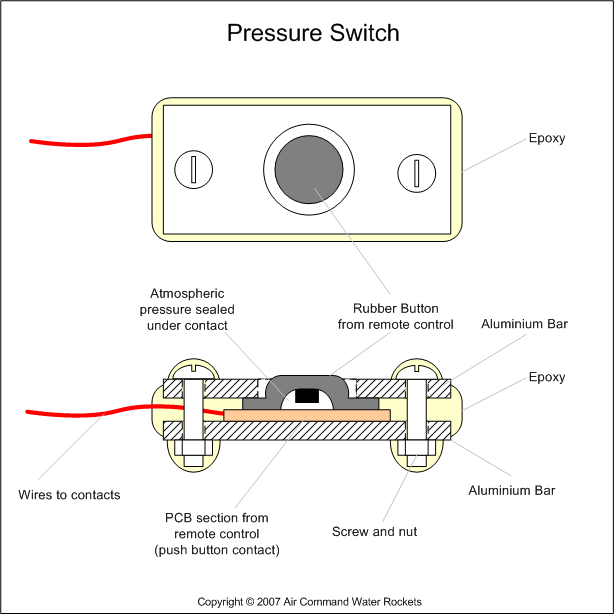
A simple pressure switch made by sandwiching
a remote control button between two pieces of
aluminium.
The components that make up the pressure
switch.
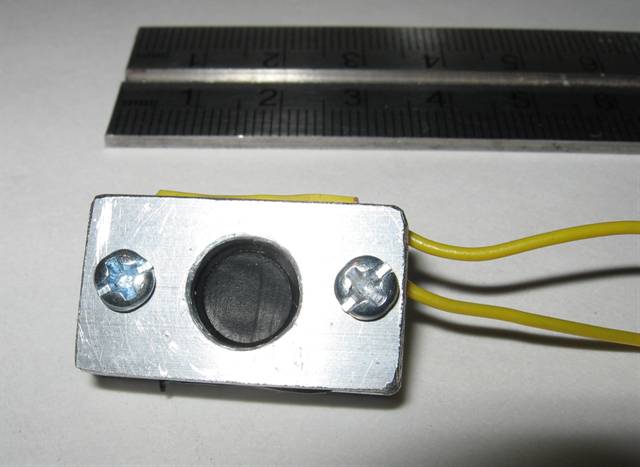
Assembled switch, front view.
Rear view of the switch.
Prototype sealed with epoxy and for testing
the leads were epoxied into a lid.
Side view of the epoxied switch
Date:30th
September
20076:30am - 8:00 am(event 1); and
1st October 2007
10:00am - 10:45am.(event 2)
Location:Denzil Joyce Oval
Conditions:
Strong wind (20-30km/h),
sunny, 28 deg C Team Members at
Events:
GK, PK, Paul K, John K, JD and MD
(event 1), GK, PK and JD (event 2)
We've been wanting to do this Zero-G
(freefall) experiment
for about 6 months now and finally managed
to fly it this weekend. There have also been
a number of other developments in the last
two weeks so this is a bit of a long update.
We'll cover the zero-G experiment first and
then discuss, altimeter flights with and
without foam, and wrap up with a design for
a simple pressure switch.
Zero-G experiment
Inspiration
There have been a lot of discussions on
the water rocket forums about gravity based
apogee-detecting deployment systems. The
theory goes that a weight hanging down will
continue to hang down as the rocket flips
upside down at apogee and the hanging weight
will activate the parachute deployment
system.
This works on the ground but does not
work reliably in flight. This is due to the
fact that the rocket and the hanging weight are
essentially both in freefall from the time the
rocket stops producing thrust. This freefall extends from burnout, through apogee
and
all the way back to the ground. The only
other forces acting on the rocket are caused
by drag through the air, which decreases as
the rocket slows down near apogee, and
increases again as the rocket accelerates.
We wanted to demonstrate what happens on
board a rocket under these freefall conditions.
If you recall Mike Melvill's famous
sub-orbital flight
on SpaceShipOne and in particular him
releasing a hand full of M&Ms, watching them
float around the cabin in Zero-G. The video
can be seen
here the M&Ms get released about 1:30 into video.
AGR performed a similar
experiment a few years ago.
So we
decided to replicate the same experiment on
one of our water rockets. Compared to Mike's 3
minutes of Zero-G, we ended up with only
a few
seconds, but long enough to see the same
effect.
Experiment Setup
One of the keys to making this experiment
work was to allow the rocket to freefall as
long as possible. This meant opening the
parachute well past apogee. We used the
flight computer's ability to set a longer
time delay from launch to parachute deployment.
We used water only (not foam) on these
flights as we wanted the rocket to stop
producing thrust as soon as possible after
takeoff in order to enter freefall earlier.
We used our Hyperon Standard Platform rocket in a three
bottle configuration as the rocket motor with
a long
experiment payload attached on top and
finally the recovery system nosecone on top
of that.
The experimental payload was constructed
by splicing three 1.25L bottles together
with the bottle bases at either end. Since the
experimental payload is not pressurised the
joins only needed minimal overlap.
A small video camera was attached inside
the top of the payload looking down towards
the other end of the payload. We also emptied a packet of
M&Ms into the bottom of the
payload. (See diagram on left)
Preflight Experiments
Before flying, we first performed a
number of ground experiments to
see if the concept would work. We tested the
focal length of the camera to see if the
M&Ms would stay in focus or whether we would
need to add a lens to make them sharper. In the end
we decided that the amount of blur was
acceptable and decided to go without a lens.
We also subjected the M&Ms to forces on
the kitchen scale to see at what
acceleration they would crack. They held up
well to over 100Gs so that wasn't going to
be an issue.
We also tested the effect simply by
throwing the payload section with the camera
and M&Ms into the air and catching it again.
This showed the Zero-G effect although only
briefly.
Flight Day Events
The Graviton rocket was the first
off the launch pad for the day. We set
the parachute deploy to 2 seconds later
than normal. The flight went well and
the rocket pitched over well at apogee.
The parachute blossomed about 10 meters
above the ground, but because the parachute
string was too far back on the rocket,
the rocket continued to point towards
the ground and ended up hitting pretty
hard. The nosecone suffered minor
damage, but could not be flown again on
the day.
The payload video was interesting
although not unexpected. The M&Ms flew
towards the camera after burnout and
remained there (actually behind the
camera) for the rest of the flight.
We repaired the rocket and added a
bulkhead around the camera so the M&Ms
could not fly past the camera. This had
the effect that some of the M&Ms covered
the lens during the flight.
On the next day we flew the Graviton
rocket again three times to see if we
could get a better video of the M&Ms.
The videos always show the zero-G
condition just after burnout, with the
horizon in the background pitching over
much later as the rocket goes through
apogee.
One of the flights was unsuccessful
because the camera was in the wrong mode
to record video.
The rocket behaved well on all three
flights and with minor damage that will
be repairable quickly. The one thing we
were also happy about was that although
the rockets had a few harder landings,
the now glued servo motors remained
intact.
(If the video does not play, try the latest
Flash player from Macromedia)
Experiment Conclusions
The experiment clearly demonstrates
that after burnout all unattached things
inside the rocket fly forward and remain
there until impact with the ground. This
is due to the induced drag force caused
by the rocket flying through the air.
This has the implication that most
gravity based parachute deployment
systems will actually activate at
burnout rather than at apogee.
We were hoping to see more of the
zero-G effect of the M&Ms floating
around for longer, but we did not know
really what would happen until the experiment
was flown.
We now have a number of ideas on how
to improve this experiment, and get the
M&Ms to float around longer but more on
that next time.
M&Ms on a hot day inside the rocket
can become quite soft. After the last
flight a lot of them were pulverised.
We want to fly this rocket on a less
windy day where the turbulence on the
rocket will be reduced. We also want to
reduce the rocket spin as much as
possible.
Altimeter Flights
After more than a year of flying water
rockets we finally bought a couple of
altimeters so that we can get some direct
feedback on rocket performance as we make
design changes. The altimeter is the
Zlog Mod 4. by Hexpert Systems We are
quite impressed with the accuracy and
functionality it has. We fitted the
altimeter to the newly rebuilt J4 IIIb
rocket.
One of the main reasons for choosing
this altimeter was that it can be started on
the ground and does not need a certain gain
in altitude to start recording like some
others. With some of our slow take-offs this
wouldn't have triggered the other altimeters. At 8
grams and powered by the flight computer
battery, it has minimal impact on rocket
performance.
We mounted the altimeter in the nosecone
section and padded it with foam. We used the
altimeter's servo pass through feature which
meant hooking it up was trivial. We just
plugged the altimeter to where the servo
plugs into the flight computer and we
plugged the servo into the altimeter. There
is a small hole near the altimeter in the
payload section to allow air pressure in and
a small door covers the altimeter so that we
have access to the altimeter for downloading data.
Flight #1
We only flew the rocket twice because of the strong wind. The rockets were
drifting a long way down range and towards
trees and the river.
We flew the first flight with water only
and at 110psi. The parachute opened a little
past apogee. This can be seen in both
the video and altimeter data. The altimeter
data is shown below:
(click to enlarge)
The rocket reached 321 feet (
98 meters )
Because the initial launch elevation and
final landing elevation are more or less the
same in real life and the altimeter zero
point was set a little above these, then to
get a more accurate altitude we use the
midpoint between the before launch and after
landing altitude measurements and added this to the
altitude.
We then entered the launcher and rocket
parameters into Cliff's simulator and it
predicted an altitude of 327 feet.
Which is in very close agreement. This gives
us further confidence in both the altimeter
and simulator accuracy.
Flight #2
Our second flight had an almost identical
configuration except we added a little foam
40mL, (the water amount was the same),
pressure was increased from 110psi to 120psi
and the water/foam mixture was set up to use
the Jet Foaming technique.
The altimeter data is below:
(click to enlarge)
The rocket reached 483 feet. (
147 meters )
The one thing that really surprised us
was that the simulator predicted that the
rocket should have reached 369 feet (
112 meters ) with the added pressure.
This is a very significant difference and is
continuing to support our suspicions that
foam actually generates a significant
performance boost over straight water. The
flight also looked very high in the video.
From the altimeter data we also get a flight
time of 31.8 seconds.
We have already started seeing
evidence from previous flights of the foam's
performance. However, these two
flights aren't enough to provide reliable
evidence and so over the next few weeks we
are going to try to fly a lot more
comparison flights to see what the real
difference is between water-only and foam.
Good flight with
parachute opening well past apogee.
Flown with loose screw from previous
flight. Chocolate starting to melt
inside rocket. Significant cracking
in M&Ms. Good landing. Camera
recorded full flight.
Good flight.
Parachute deployed close to apogee
but did not blossom until later.
Good landing and camera recorded
full flight.
Pressure Switch
We designed and tested a simple pressure
switch in the last two weeks as well. The
purpose of such a switch is to detect when
the rocket stops producing thrust. This is
useful for initiating staging or combined
with a delay to deploy a parachute. The
whole thing can be built for around 10c.
This switch carries out the same
functionality as Trevor's TDD without the
need to make a large hole in the pressure
chamber that can weaken it. The pressure
switch can be used at either end of the
bottle.
A pressure switch has the advantage over
pure launch detect switch because you can
vary the amount of water, nozzle size and
pressure in the rocket without the need to
change the delay for each combination.
The switch activates at around 10-20psi.
Actually the switch resistance changed as
pressure increased, although not linearly
enough to be used to measure pressure. But
works well as pressure/no pressure switch.
(Fully activated is around 200 ohms, without
pressure it is several mega-ohms)
The whole thing is made out of a button cut
out of the rubber membrane from an old
remote control. The button contact is made
from a section of the remote control's PCB.
The button and PCB are just tightly
sandwiched between two pieces of aluminium
with a couple of screws. The sandwich is
sealed with epoxy except where the rubber
button pokes out. The rubber flange around
the button provides the seal.
Atmospheric pressure is just trapped
underneath the button so that the entire
unit can exist inside the pressure chamber
except for the wires sticking out. Since
this was only a prototype I just epoxied the
wires into a lid. Eventually the whole unit
will be glued to the lid and not dangling by
the wires as shown here.
The whole thing weighs 10 grams but you
could probably shave off half that without
too much fuss.