Each flight log entry usually
represents a launch or test day, and describes the
events that took place.
Click on an image to view a larger image, and
click the
browser's BACK button to return back to the
page.
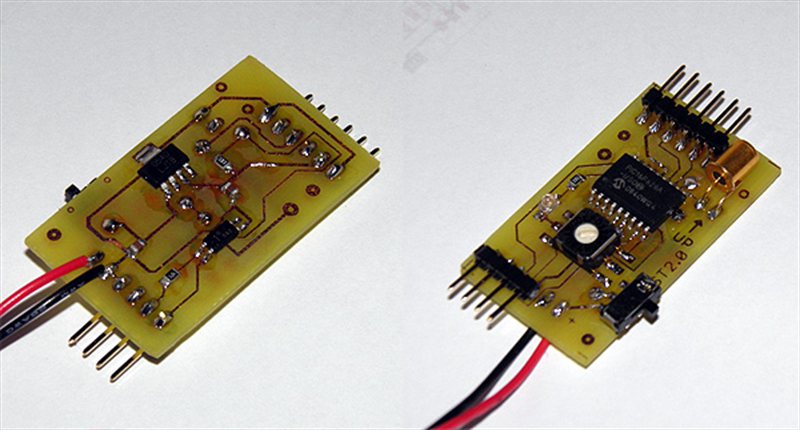
Day 102 - Servo Timer II test flights
Prototype PCB ready for cutting and drilling
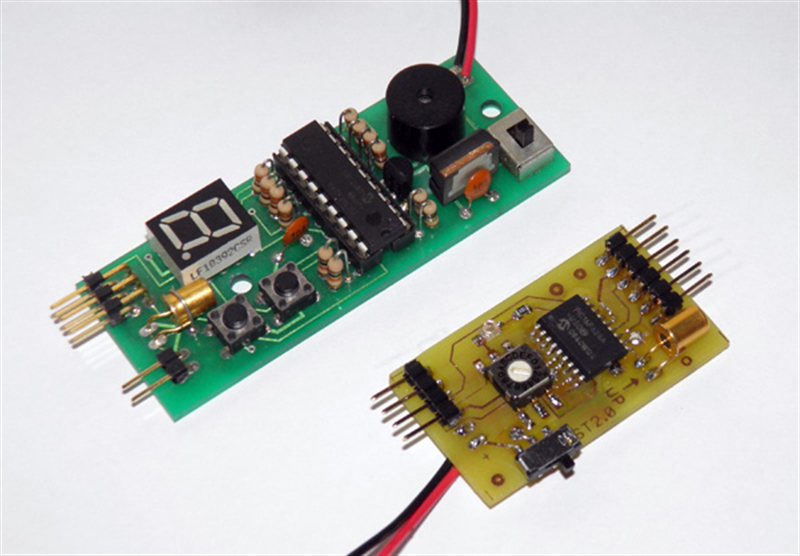
Servo Timer II assembled.
Size comparison against V1.6 FC
Timer fitted to the new deployment
mechanism.
Here it is connected to a uMAD.
3 rockets ready for flight testing the servo
timer.
Details of the deployment mechanisms
Launch crew ready.
Fist flight @ 100psi
We used 700mL of water.
Jordan and Paul helped a lot on the day,
with filling, launching and retrieving.
Second and third flights deployment was
controlled by the uMAD
Filming the launch
Recovery crew already on the scene even
before landing.
7 successful launches and recoveries in 1
hour.
All rockets were launched with a 9mm nozzle.
Coming in for a gentle landing.
Launch operations
Production line, getting ~70 bottles ready
for splicing.
Here they have been shrunk and curled.
Date:27th
March 2011
4:20pm - 5:20pm
Location:
Denzil Joyce Oval, NSW, Australia
Conditions:Breezy and overcast. Temp ~20C
Team Members at Event:PK, Paul K, Jordan K and
GK
Servo Timer II
After a couple of weeks waiting for the
weather to clear up, we took the Servo Timer
II
out for a spin this weekend. We want to
trial the timer under various flight
conditions and on board several different
rockets before we get the PCB boards made up.
This first set of tests was designed for
small rockets with lower pressures using small
nozzles.
We've also been tweaking the firmware to
filter the G-switch to help prevent false
triggers and adding another trigger mode
that allows for manual arming.
We fitted the servo timer to a new
nosecone and hooked up a couple of the small
70mAh LiPo cells for power. The whole
nosecone now weighs 86 grams compared to the
154 grams of the previous version. This represents about a 45% weight
reduction.
New Ejection Plate
One of the biggest problems with the side
deploy mechanisms we use has been
the reliance on rubber bands to eject the
parachute. Because they stay somewhat
stretched even with no parachute in the bay,
they end up deteriorating over time. After 2
weeks they have to be replaced because they
loose their elasticity and break. The rubber
bands also don't provide a lot of ejection
force.
So for the Servo Timer II tests we
replaced the rubber bands and ejection plate
with a bent piece of PET bottle.
The attachment method is designed so that
once the parachute is in the bay, it does
not require a lot of force to hold it in.
But when the parachute starts ejecting, the
force is magnified and the parachute is
really kicked out. This concept is similar
to the compound bow in that it doesn't take
a lot of force to keep it pulled back, but
provides lots of force for the arrow once
released.
The ejection plate is attached
further back from the edges to allow it to
bend easier. Other than the ejection plate
itself, all other components of the deploy
mechanism remain the same.
Building up inventory
We have also been processing quite a few
bottles from our bottle collection. We are
trying to build up our inventory of spare
parts so that we can concentrate on flying
rockets and experiments this year without
having to go and do repairs between
launches. About 72 bottles were cleaned,
trimmed, sanded and some glued to make up 10 x
110mm spliced quads and 11 x 90mm spliced
quads. This is the first time we have tried
making the 90mm versions. The capacity of
one 90mm quad is 3.12L. These will be
reinforced with fiberglass.
We also made a couple more 9mm nozzles, 3
more 90mm nosecones with deployment
mechanisms, and a number of fairings.
I've also bought another uMAD from
Whooshtronics to serve as a backup
deployment mechanism on some upcoming
projects.
Launch Day Report
We went down to the local park on Sunday
afternoon to do the test flights, but when
we got there, there were a couple of
football games happening. I mean who plays
organized sport on Sunday afternoon? So we shifted
operations to the neighbouring field, but
because it's quite small and there was a
cross-breeze we had to limit the pressures
to 100psi to keep the rockets in the park.
We flew 3 different rockets over 7
flights at 100 psi using a 9mm nozzle. 2 of
the flights used the uMAD
to trigger the deployment at apogee. This
way we managed to fly all 3 servo timer
prototypes at least a couple of times. One
of the timers used 2 x LiPo cells while the
others used a 9V battery.
All seven flights went great and
parachutes deployed when they were supposed
to. All rockets landed without damage.
The timer also didn't trigger when the
rocket popped up in the launcher while
pressurising. This is what the launch detect
filter was designed to filter out. Pressurising
vibration also wasn't an issue. I will
probably go back and add the filter to the
firmware for FC V1.6. The new ejection plate
also worked well on all it's flights.
The next set of tests will focus on medium
sized rockets and foam launches where we get slow
acceleration. We'll also do some high-G
flights to see how the timers behave. We
would like to do another 10 to 15 flights to
see if any issues come up.