Each flight log entry usually
represents a launch or test day, and describes the
events that took place.
Click on an image to view a larger image, and
click the
browser's BACK button to return back to the
page.
Day 103 - Polaron
G2 CATO and Servo Timer II test flight
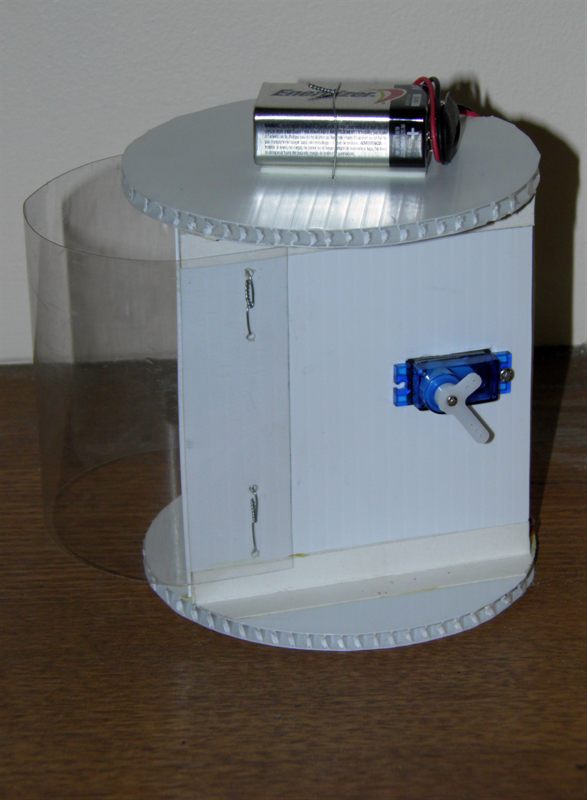
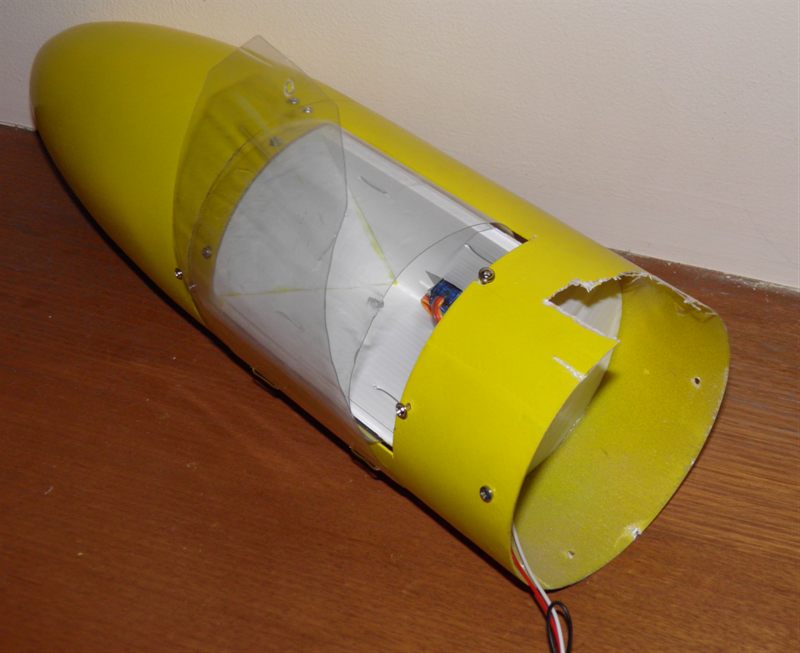
New side deploy body with PET ejection
plate.
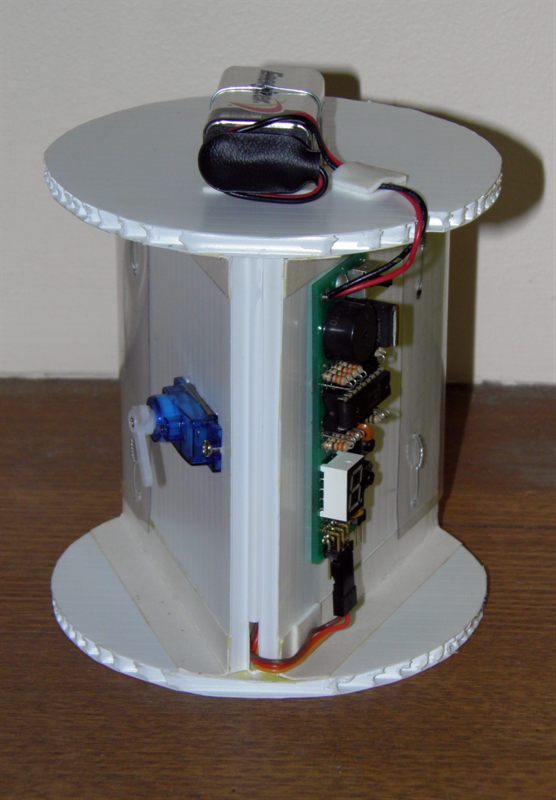
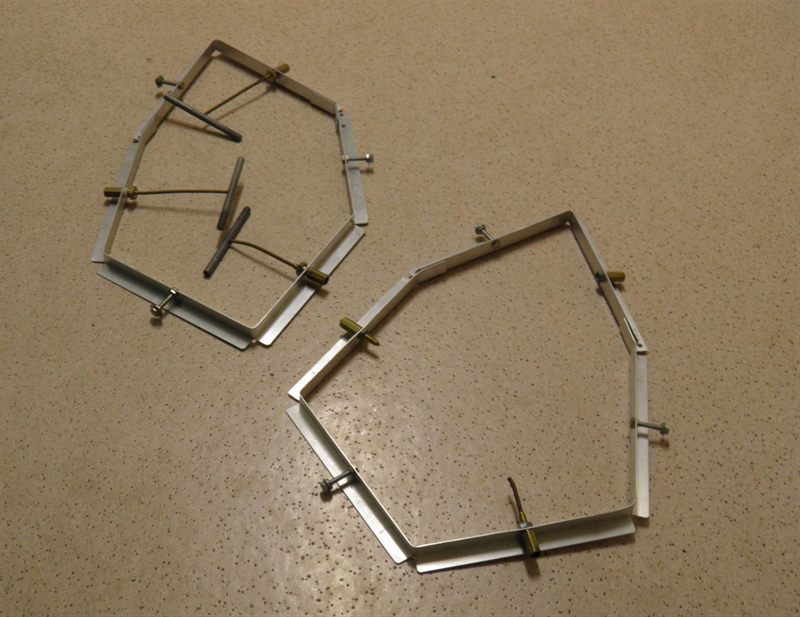
Internal framework with servo and flight
computer connected to a 9V battery.
Detail showing the location of the servo
motor.
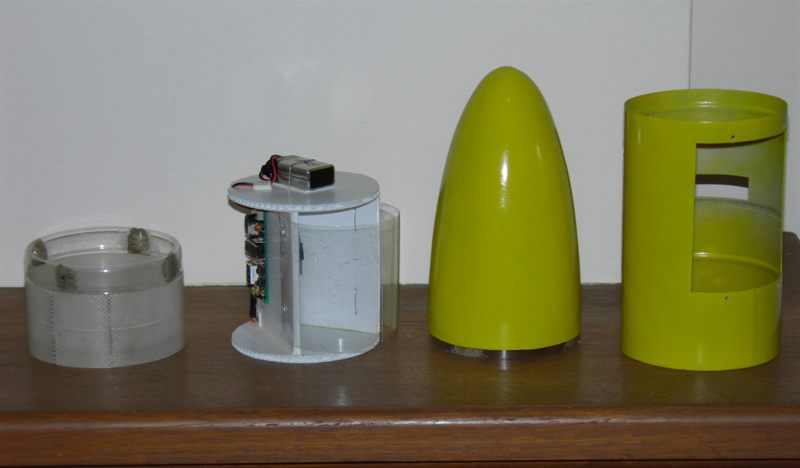
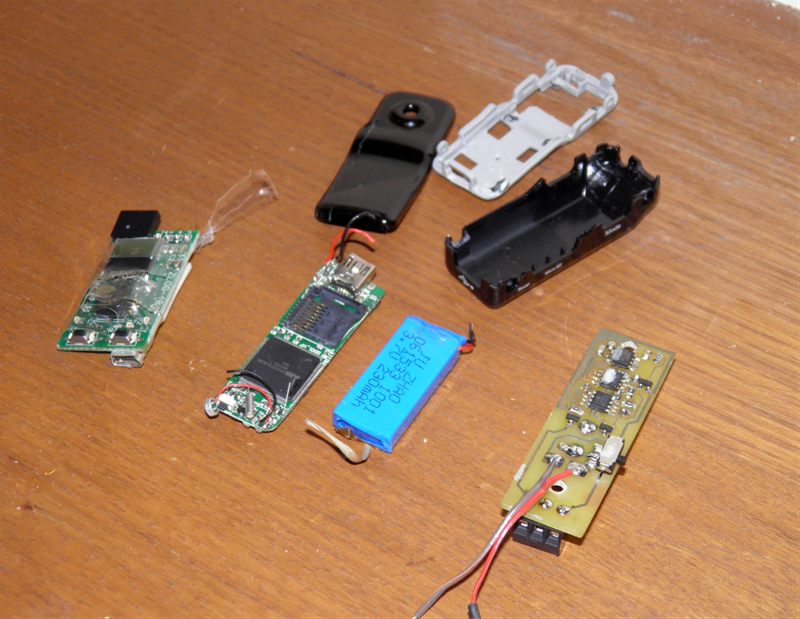
Components of the entire nosecone deployment
mechanism.
Assembled nosecone ready for installation on
top of the rocket.
Electronics payload section.
Backup parachute is controlled by a MAD with
Servo Timer II.
The MAD is powered by a single 70mAh LiPo
and the ST II and altimeter are powered by two
70mAh LiPo batteries.
Servo, Z-log altimeter and MD-80 clone
camera,.
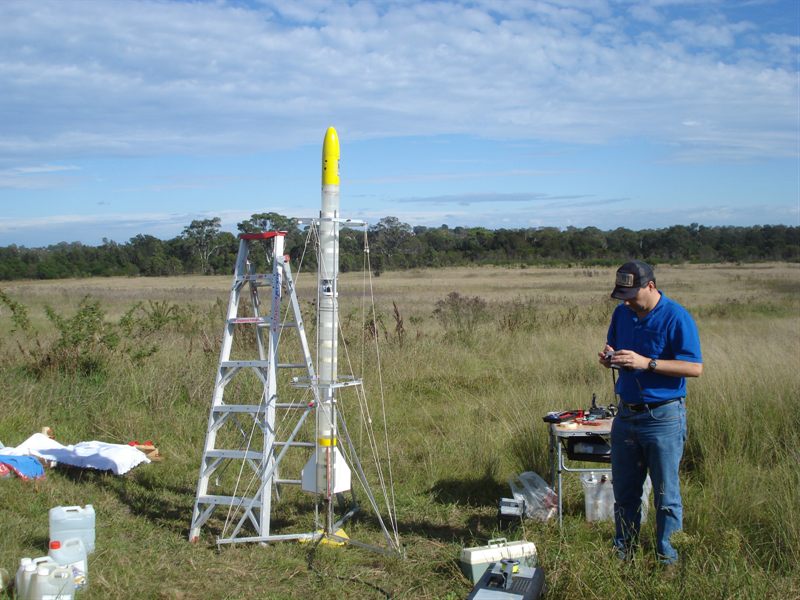
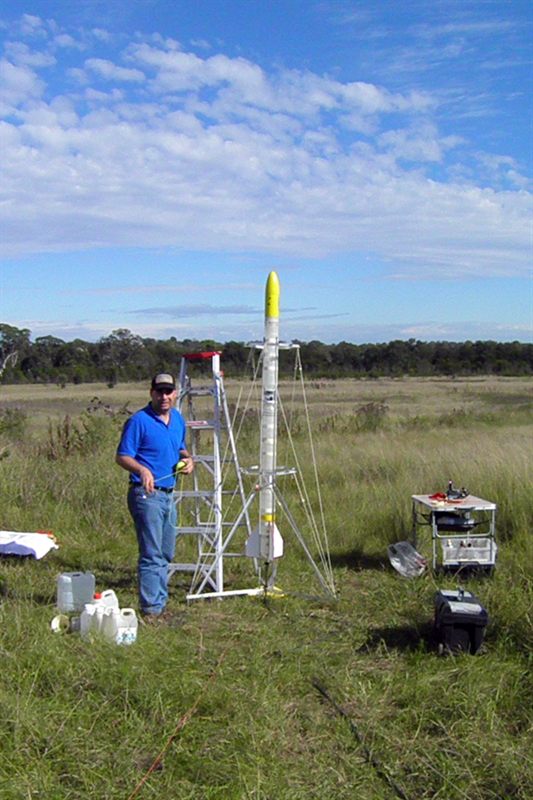
Fully assembled and ready for flight the
night before. The payload bay is fitted once on
the pad.
T -5 minutes
We pour in 3.8L of water.
Final check before pressurising to 250psi.
Perhaps we need to wind it back a little.
A new sculpture is born on the rocket range.
There were some very serious forces
involved.
That will buff out.
Nosecone only has minor body damage. Easily
repaired.
Coupling with bottle necks still stuck in
it.
The failed bottle.
Nicely trimmed fiberglass reinforcing. We
suspect the launcher guide rails made the clean
vertical cuts.
Top section of the failed quad.
Electronics payload bay with servo and timer
still attached.
Zlog altimeter (OK) smashed MD-80 clone
camera, and MAD (OK).
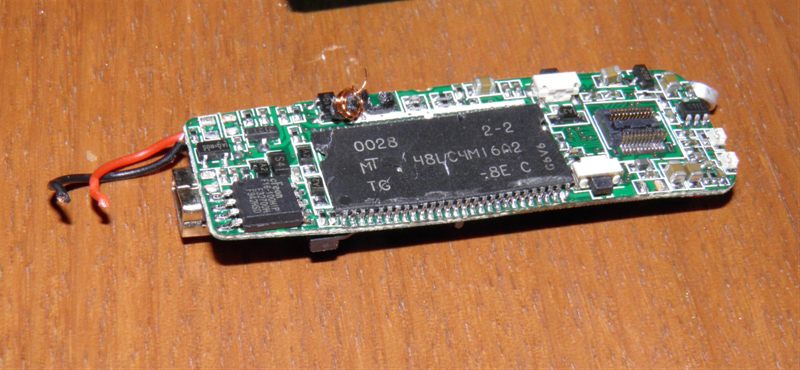
Camera PCB with shattered IC.
The explosion was powerful enough to shear these
bolts and tubing.
Distorted hexagonal ring bracing.
Guide rails neatly bent. These need to be
replaced.
Axion IIc after landing on a high-G test of
the ST II.
The wind picked up the gazebo and threw it
over our cars. :(
ST II safely recovered the rocket.
Paul's Pod 2, 2 stage rocket flown on a
couple of C motors...
...had an easy recovery right near the pads.
Date:10th
April 20118:15am - 11:30am
Location:
Doonside, NSW, Australia
Conditions:Windy 20km/h with gusts to
30km/h later int he day. Temp ~26C
Team Members at Event:PK, Paul K, John K and
GK
Polaron G2b
During the last couple of weeks we
concentrated on getting the G2 ready for
flight again. We replaced the in-line
deployment mechanism with a side deploy that
has worked well for us. We also added an
independent backup parachute mechanism in
the first gap between bottles. The backup
uses the Servo Timer II and a MAD to detect
when the rocket tips over at apogee. This
was done so that if something went wrong
again and the rocket flew lower than
expected then the backup would fire when the
rocket tipped over.
We also added the altimeter and camera to
the payload bay. All the electronics are
also powered by a couple of the little LiPo
batteries. All up including the 32 gram parachute
and complete payload bay, only weighs 150
grams.
Both the main and backup parachute
ejection plates are based on the same
principle we trialled with the Servo Timer
II tests two weeks ago.
The nosecone is also new and made of
thinner and lighter fiberglass compared to
the in-line deployment mechanism from the
previous version.
We also opted for only 3 spliced quads on
this flight, in case something went wrong
again.
Launch Day Report
It was just one of those days where
things just don't quite go your way. We had
the Polaron G2 ready on the launch pad and
fully pressurised, armed, and mere seconds
from lift off when BOOM! The top spliced
quad failed sending out bits in all
directions. This was our first quad failure
at this pressure, though the pressure
chamber had been hydro tested to 270psi a
week before. We can only speculate why it
failed, perhaps a weakness in one of the
spliced bottles, or perhaps the result of
higher temperatures due to air compression
weakening the PET bottle? The rocket was
filled quite quickly so this is a likely
cause.
The damage was quite extensive, and
certainly one of the more expensive
failures. The video camera was smashed to
bits even cracked some of the ICs on the
board. We didn't have the protective sleeve
on the camera which probably would have at
least kept all the bits together. This way
they were all scattered in the tall grass.
We didn't find the little SD card. There
wouldn't have been much on it anyway as the
camera was facing out. The altimeter went
flying which we managed to find in the end,
the wires were ripped off, and the USB
connector was bent, but after straightening
it out I was able to connect it up to the PC
and thankfully it still worked. There was no
useful data on it as power was severed while
it was still on the ground.
The MAD and servo timer 2 in the payload
bay also appear to have survived with a
couple of bent pins. The servo motor was
also intact. . The LiPo batteries are gone
as we only found the contacts pulled out of
the batteries.
The nosecone deployment mechanism
survived with only a little damage to the
fiberglass body which is easily repairable.
The launcher was quite badly damaged from
the failure and bent the guide rails beyond
repair. All the aluminium tubing will have
to be replaced. We are currently looking to
see what improvements we can make on
the launcher since we need to rebuild some
of it.
Since the guide rails were damaged, we
only flew the Axion IIc rocket off the
launch tube to test the ST II on a larger
rocket and at higher G-loads. The timer
worked well, and the rocket landed without
incident. We decided against launching it a
second time as the wind at this stage was
gusting to 30km/h. The wind managed to flip
our gazebo over our cars at the same time. Note to self: secure the gazebo better
next time!
Earlier in the day we also launched
Paul's 2-stage pyro rocket on a couple of C
motors and it flew well and both stages
virtually landed back near the pads.
Though it's always disappointing to lose
a rocket on the pad without even flying it,
it's just a part of the water rocket
development process. From incidents like
these, we always learn something new, and
making a replacement is always easier as the
design work has been done.
The rocket is now well into it's repairs
and we look forward to having another
attempt at launching it soon. A new MD80
clone camera has been ordered, and with the
strength of the Australian dollar, it only
cost $11.50 delivered.