Each flight log entry usually
represents a launch or test day, and describes the
events that took place.
Click on an image to view a larger image, and
click the
browser's BACK button to return back to the
page.
Day 108 - Pan Cam - A Different Perspective
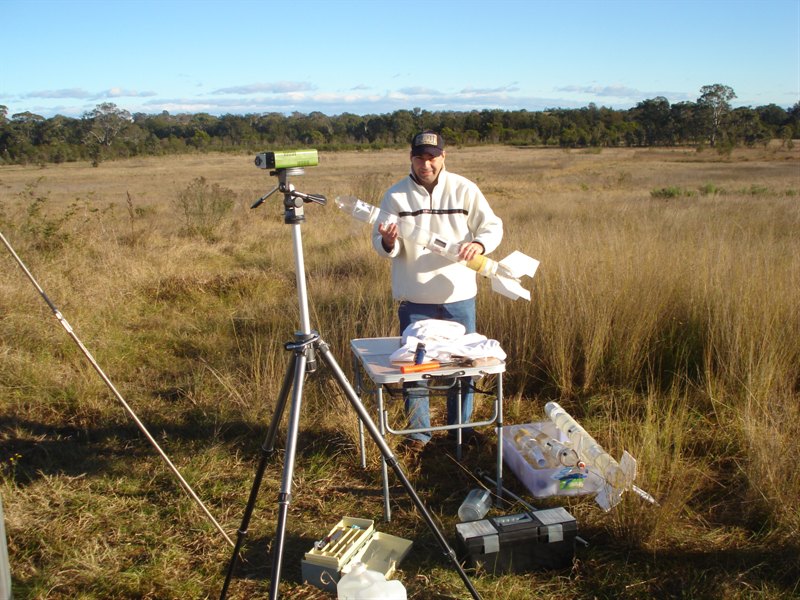
Pan Cam
Inside the pan cam is just a 9V battery, and
a standard RC servo. STII controls the servo
when triggered.
The servo horn has a simple bracket and
screw to attach the camera.
The micro switch is attached to an
adjustable clamp to allow you to position it
under any part of the rocket.
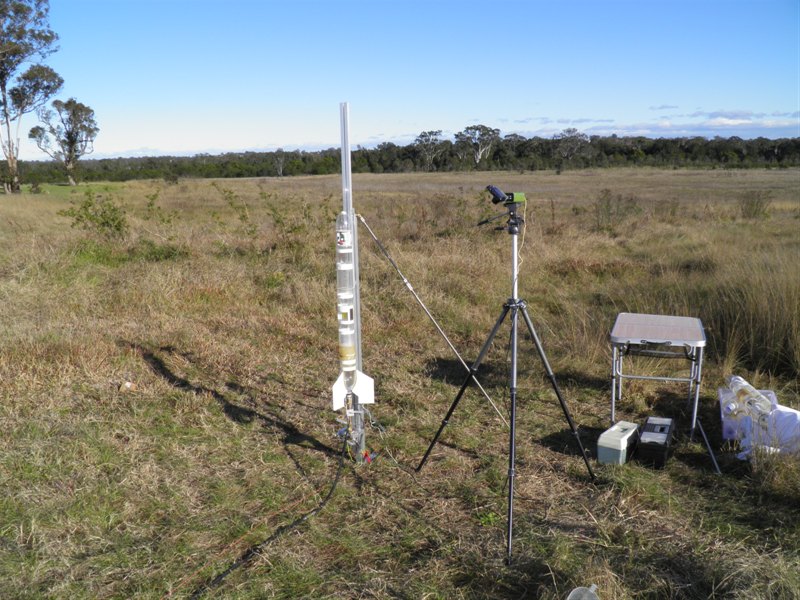
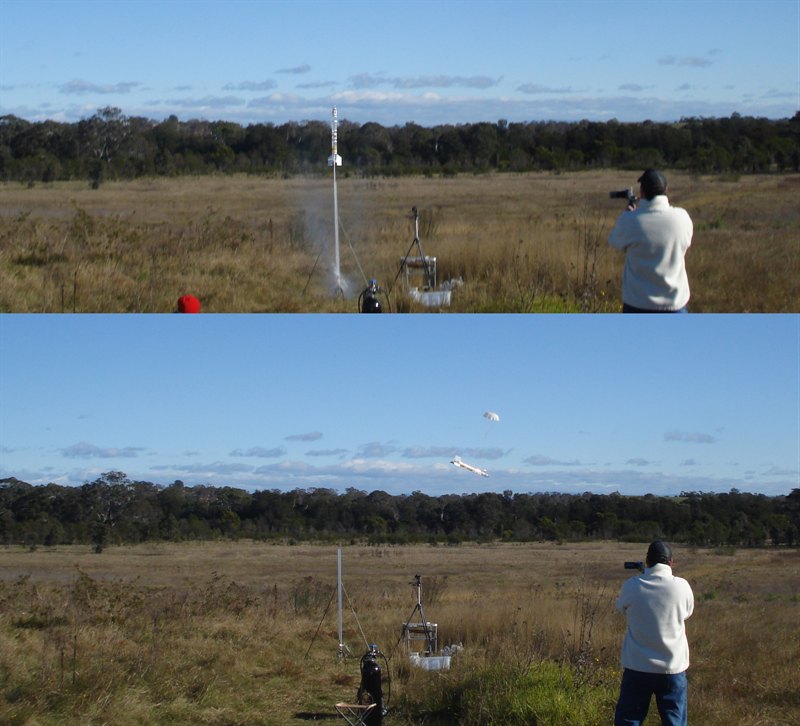
Setting up for the first flight.
On the pad and ready.
Launched at 100psi.
Rocket drifted a long way in the wind.
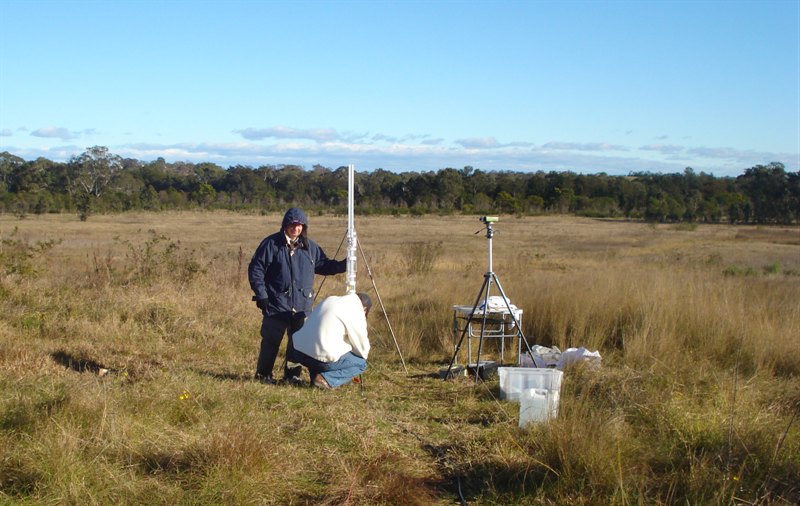
Setting up for launch #2. John is starting
to take good pictures.
Pan Cam view - frame from the video
Getting to the end of the guide rail.
Still in the water phase.
Just after the air pulse.
Retrieval team in action.
The camera does get a few droplets on it,
but not too bad.
Setting up for the last launch.
What goes up must come down.
Date:10th
July 20118:30am - 9:40am
Location:
Doonside, NSW, Australia
Conditions:Blue skies, 40km/h wind, temp ~12C
Team Members at Event:PK, Paul K, John K, and
GK
Pan Cam
Last week I watched a couple of pyro
rocket videos of the
LDRS29
launch from the US, and
saw a very unique shot of a rocket
flying past a camera at the top of the tower and the camera
tracking it as it went past. So we thought
we would
give it a go too. Tracking it optically or
thermally would have been difficult, so we
opted for setting up the camera so it would
just move according to a predicted path of
the rocket. Knowing the rate of the servo
movement, the acceleration profile of the
rocket and a bit of trigonometry, we worked
out roughly where the camera needed to be.
The original concept of
the panning camera for a water rocket
triggered by launch was first developed by
wyldbytes. He presents his idea here:
http://www.wyldbytes.co.uk/?p=225 as a
part of an automated and servo controlled
launch trigger. A video demonstrating the
concept is here:
http://youtu.be/F284FmfZuMI
We mounted the
servo timer
II, battery and an RC
servo in a box and put it on top of a tripod. We also
attached a bracket to the servo horn so we
could attach the Casio high-speed camera to it. The start and end servo positions were configured
so that the camera would start out pointing at the nozzle
and end up pointing about 85 degrees from
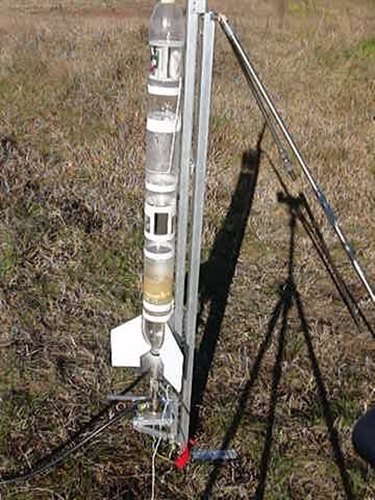
the vertical as the last position. We ran a pair of
wires from the STII's external trigger to a
micro-switch mounted under the rocket's fin.
This ensures the camera only starts
panning once the rocket actually starts moving. This
made it a lot easier to synchronise as rockets can be quite
unpredictable as to when they actually start
moving when
you pull the string.
Launch Day Report
We arrived at Doonside at 8:30am, but the
wind was really starting to pick up. Pyro
rocket launches were cancelled for the day
and so we decided to downsize one of the
rockets to just over 3 liters to stop it
going too far since we were really only
interested in trying out the Pan Cam.
We set up the Pan Cam fairly close to the
rocket and launched it at 100psi. The first
part of the flight was good but the camera
just missed the rocket as it was leaving the
launch rail, but caught up with it quickly
again. After the parachute opened the rocket
drifted a long way down range in the strong
wind.
For the second launch we put the camera
back about 1 foot, and adjusted the start
position to have the nozzle nearer to the
bottom of the frame rather than at the
center. This time the camera followed the
rocket well and the video turned out great.
:)
While setting up for the third launch we
again pressurised the rocket slightly to
make sure it was popped up in the launcher
so we could set the microswitch properly
under the fin. As I was pushing the switch
up to the fin I accidentally pulled on the
release mechanism and launched the rocket.
Because there was very little pressure in
the rocket, it didn't go very high, but
since the timer was still turned off the
rocket just came down nose first in the
grass. The nose fairing was bent, so we
swapped the nosecone and reloaded the rocket
onto the pad. Other than the bent fairing
nothing else was damaged.
The third flight was similar to the
second one and the camera again tracked the
rocket really well. With the wind speed
increasing we packed up and were heading
home before 10am.
Overall we were really happy with the
results, but didn't get to test it with pyro
rockets like we wanted to. We'll try that
during the next launch. If I get time I'll
have a look at updating the firmware by the
next launch so you will be able to set a
particular pan velocity profile for the Pan
Cam so it will be easier to match a
rocket's expected flight profile.
Here is a
video from the day including an explanation
of how it works and videos from it.