|
Date: 15th
April 2009 (8am - 12:30pm)
Location:
Doonside, NSW, Australia
Conditions:
Clear early, with cloud increasing,
22 C, wind 15-20km/h with gusts up to 35km/h
Team Members at Event:
GK, AK, Paul K and John K
This week we went out
to Doonside with only a couple of smaller
rockets. One of them was designed by Paul
and we built it together. It's maiden flight
had been delayed a couple of times so this
time it was going to be the first one off
the pad. The payload was a handful of Lego
"astronauts" and the rocket even had its own
R2 unit. The weather was nice and mild, but
the strong wind was a problem.
Stabilising Descent Video Experiment
This week we were going
to try
at changing the way we attach a parachute to
the rocket in order to get more stable
descent video. Normally when the rocket is
tethered by a single line, the rocket is
free to roll from side to side and also
pitches more freely around this pivot point
especially if the rocket is attached close
to the center of gravity.
We attached the strings
either side of the rocket to stop it
from rolling, and attached them near the
nose and tail to
swing slower. The parachute shroud lines
were connected as close to these strings as
possible rather than to a long main line
in order to reduce the swinging further.
We have also attached
the strings in such a way that one of the fins points
directly down, and the other two form a V to
help stabilise the rocket as well.
For this set up the
camera was pointed to the side rather than
looking down the axis of the rocket so that it could film the
ground directly below the rocket on the way
down.
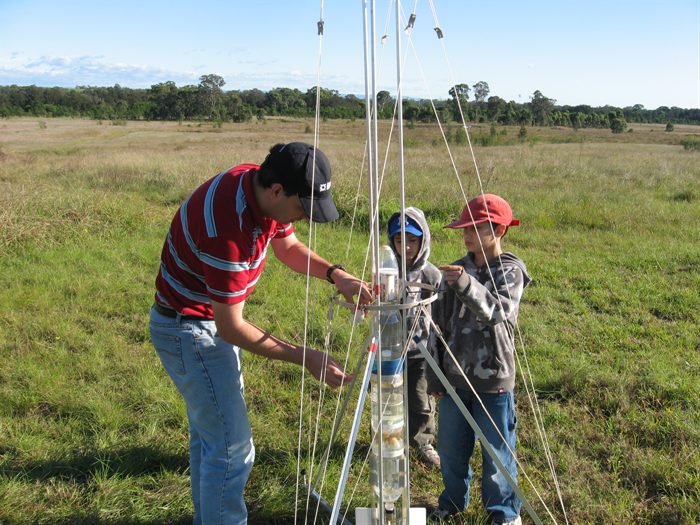
The strings were
attached at either end by a loop with a
scaffold knot and the loose end of each
string was then tied together with a reef
knot. This allows the string to be loosened
for removing the parachute and then
tightened again to secure it back in place. The
reef knot is on the bottom of the rocket and
prevents the two loops from sliding around
to the top of the rocket. With the two
separate lines there is also a level of
redundancy should one fail. (see photos at
left)
The experiment did not
go exactly according to plan.
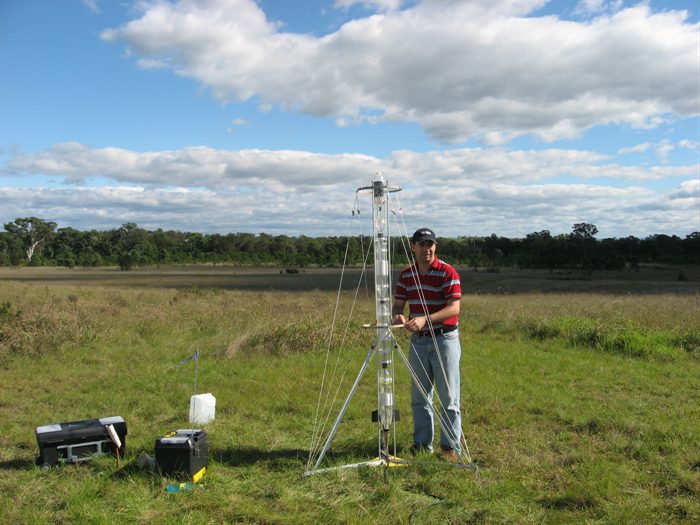
Flight Day Events
-
We set up the
medium launcher with the 2m guide rail
extensions because of the wind, to help
the rocket keep straight as it gets up to speed. We launched
Paul's Pod 1 at around 95 psi, as the
bottles it uses are old and showed a
little stretching around the neck area.
The entire rocket was constructed from
retired rocket bits lying around the
workshop. The parachute opened well and
the rocket did not drift too far from
the pad.
-
We then had about
an hour break waiting for the wind to
die down. A lot of the other rocketeers
were also reluctant to launch in the
high wind conditions. Since the wind
continued blowing we prepped and
launched the boys' small pyro rockets on
small motors (1/2A3-2's), and since they
use streamer recovery they didn't drift
far.
There were a number of pyro rockets lost
on the day somewhere in the adjoining
suburb.
-
I replaced the 9mm
release head on the launcher with a 15mm
one with a long launch tube and loaded
up the Axion rocket. This flight was
intended to test the alternate parachute
attachment for stable descent video. We
normally get pretty shaky video on the
way down as the rocket pitches from side
to side. This was going to be an attempt
to reduce some of that.
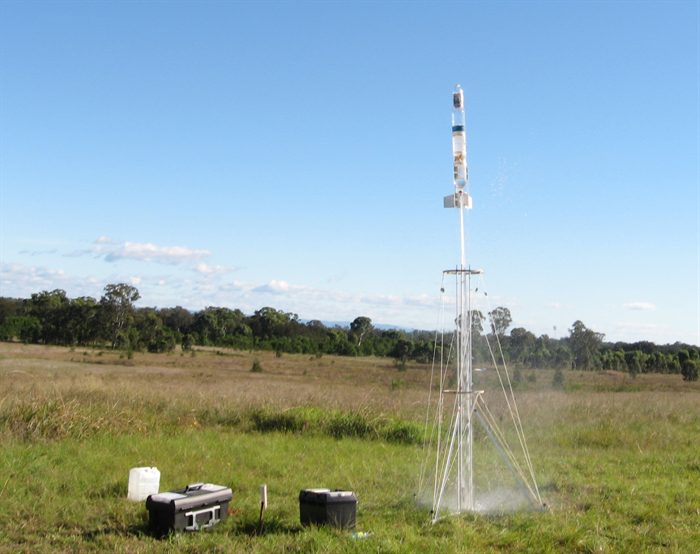
-
The rocket was
launched at 130psi and flew straight up
reaching 501' (152m). The parachute
opened well after apogee and deployed
correctly suspending the rocket as
designed. I used a small piece of tape
to hold the lines to the side of the
rocket during ascent to prevent them
from getting tangled in the launcher or
fins. The tape easily lets go as the
parachute opens.
As Murphy would have it
the on-board video stopped recording on the
way up so we never got to see the descent
video. I was able to watch and film the
rocket from the ground and the one
thing that was obvious was that the rocket and
parachute were in a slow spin about a common
center. This would have resulted in
quite a dizzying video. We will need
to add a second smaller parachute to the
tail of the rocket to stop this flat spin.
Otherwise the rocket did not look like it
was rocking. We will fly this rocket again
in this configuration at the next opportunity
to see if it actually makes a difference
or not.
The rocket drifted about 320m downrange.
I managed to step on an ant nest while
retrieving it and then spent 5 minutes
brushing them off as they started
biting.
-
I'm not sure why
the camera cut out. It was fully charged
the night before and recorded fine for 2
minutes before launch. At the time that
it cut out the rocket was travelling
quite slowly and there was no evidence
of an event that could have interrupted
the power. The camera powered up fine
after recovery.
-
We called it a day
after that launch. We have learned from
past experience that it is better to try
again during more favourable conditions
than loose a rocket.
Acceleron V Development
Over the last several weeks we have been
redesigning the Acceleron V booster in order
to be able to launch bigger payloads. There
were two primary reasons for the
configuration changes:
1. The booster/sustainer combination was
getting too long making it more difficult to
fit bigger sustainers to the booster without
putting too much stress on the staging
mechanism. Lack of sufficient longitudinal
support for the sustainer meant there was
a real danger of the sustainer bending over
under high G-loads and either sending the
rocket off course or snapping the staging
mechanism.
2. Due to the larger weight of the rocket,
more thrust is necessary to get the rocket
to stable flight fast enough. Until now all
Acceleron rockets used 10mm nozzles for each
of the booster segments. We needed to switch to
larger nozzles for more thrust. The 13mm nozzles used on the drop
away boosters of the Polaron rockets were
already made and so we decided to use them.
In order to accommodate the bigger nozzles
we would have needed to manufacture new
nozzle seats for the old Acceleron launcher.
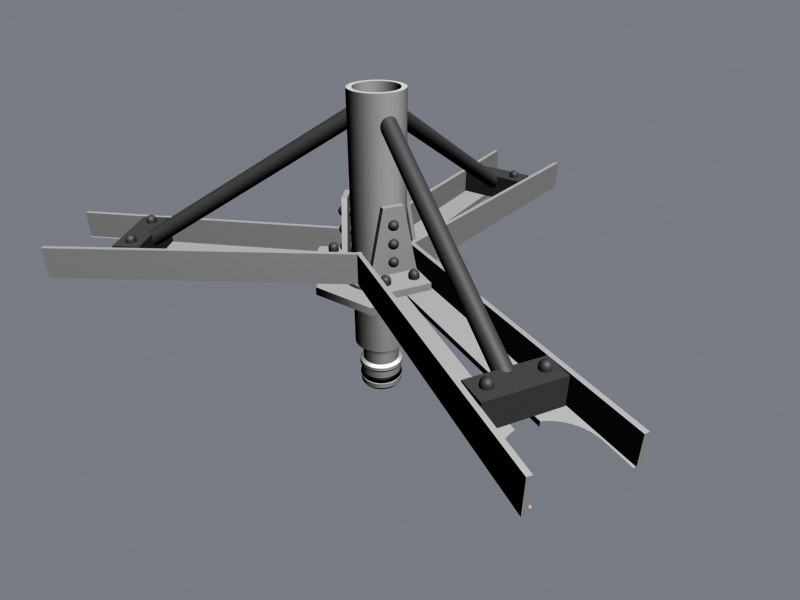
Instead of machining new nozzle seats we
decided to use the drop-away booster
launcher for the Acceleron rocket. The old
Acceleron rockets used a spear gun release
mechanism, so we are replacing this with
custom made aluminium Gardena nozzle mounted
on the base-plate that holds the cluster
together. This nozzle will fit into the
existing Gardena central release head on the
launcher. The entire rocket is held down by
this release head.
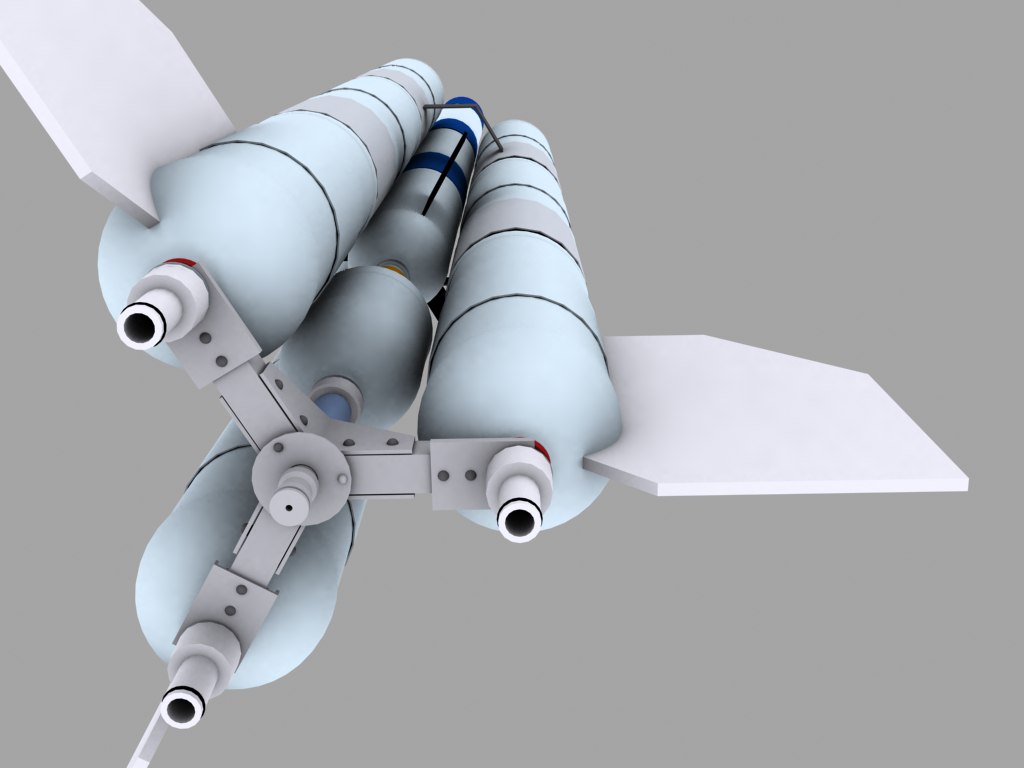
Because this launcher's minimum nozzle
spacing does not allow the three segments to
be up against each other like in the old
Acceleron rocket, we are separating the
cluster segments further from each other.
This requires a new base-plate for the
cluster. This again will be made from
aluminium and reinforced with carbon fibre.
By separating the cluster
segments we will be able to lower the
staging mechanism further down in between
the segments allowing the second stage to
also sit lower in the booster addressing
point 1 above. By lowering the sustainer
between the segments, we can use the
segments themselves as guide rails. This
will allow us to build a sustainer around
the length of a Hyperon or Axion rocket.
With long rockets like these, it should also
be feasible to add a third stage in the
future.
Other changes
- Recovery - The dual parachutes
will now be located in the space between
the spliced pairs in the segments
instead of the pod. These will most
likely be deployed using servo motors.
- Pressure switch - The old
Acceleron booster used a mechanical
pressure switch (TDD) built by Trevor
that detected when pressure inside the
booster dropped during the air pulse
phase. This was used to initiate the
staging mechanism. We will be replacing
this switch with a simpler switch (TDD2
http://groups.yahoo.com/group/water-rockets/photos/album/930791471/pic/list), also of Trevor's design that
uses a simple micro switch directly
attached to the cap. The switch will be
located at the top of one of the
segments.
I noticed this week that Nick over at
DotRocket is also using Trevor's design
so it will be good to see how that goes.
http://www.fisk.me.uk/blog/2009/03/22/pressure-switch-part-4/
- Redundancy - The staging and
parachute deployment will be controlled
by dual independent V1.6 flight
computers. I'll cover the full details
of the staging and deployment mechanisms in future updates.
- Dual Air supply -With the new
configuration and by using the booster
launcher we will be able to fill the
booster and sustainer to different
pressures. This was not possible with
the previous configuration, as the air
supply to the sustainer came from the
top of one of the boosters. We will be
able to build reinforced sustainers
allowing them to be pressurised to
higher pressures while leaving the
booster at lower pressures.
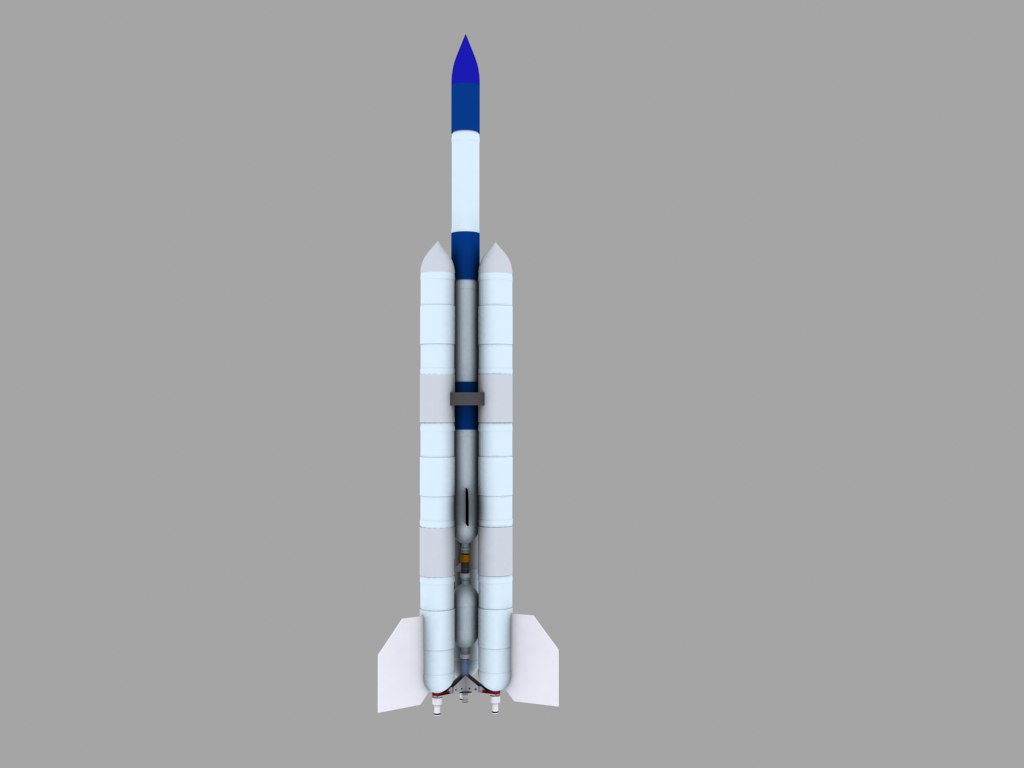
All up Acceleron V has three segments in
the cluster and each segment uses 3 x 2L
spliced pairs giving a total volume of
almost 33 liters. Including the second
stage, the total lift-off weight is now going
to be approaching 16 kilos (35 lbs).
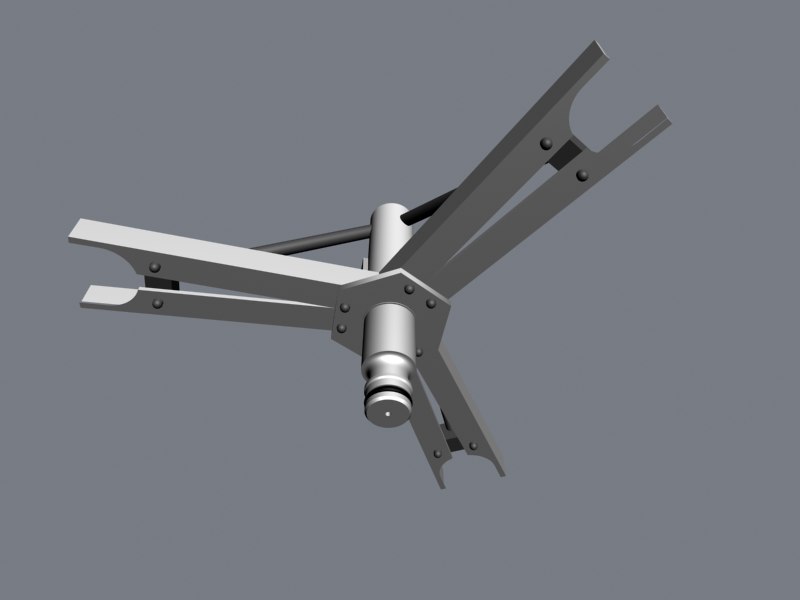
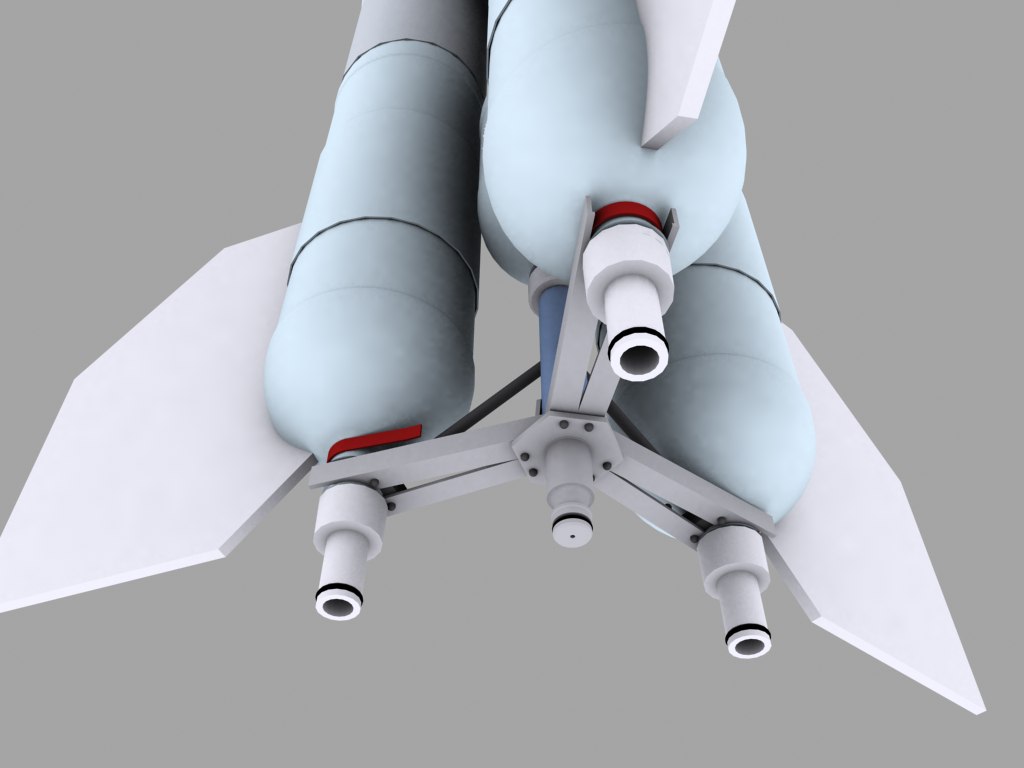
With the sustainer now supported by the
segments, it can
have a boat tail for better drag efficiency.
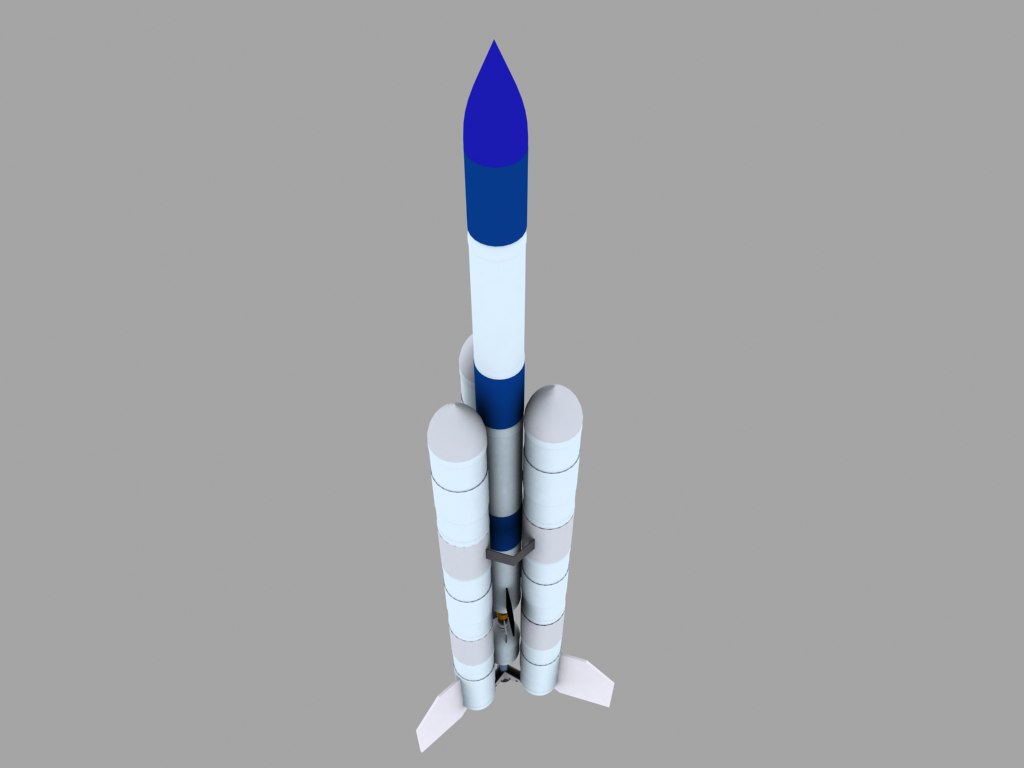
We've been modelling Acceleron V to scale in
3DS Max in order to figure out the spatial
relationships of the new release mechanism,
clearances for fins and the positioning of
the staging mechanism. Included are some
pictures of the various designs. We have all the materials now for design
option #2, and have started construction.
The next update will contain the
construction progress photos.
Flight Details
| Launch |
Details |
| 1 |
|
Rocket |
|
Pod 1 |
|
Pressure |
|
95 psi |
|
Nozzle |
|
9mm
|
|
Water |
|
1.25 L |
|
Flight Computer |
|
V1.3.2 |
|
Payload |
|
N/A |
|
Altitude / Time |
|
? / 13.32s |
|
Notes |
|
Rocket flew nice
and straight and the parachute
opened well after apogee. The rocket
landed well without damage. |
|
| 2 |
|
Rocket |
|
ThunderBee 7 |
|
Motor |
|
1/2A3 - 2 |
|
Altitude / Time |
|
? |
|
Notes |
|
Good straight
flight, streamer deployed a tad
early but the rocket landed well. |
|
| 3 |
|
Rocket |
|
ThunderBee Hero |
|
Motor |
|
1/2A3 - 2 |
|
Altitude / Time |
|
? |
|
Notes |
|
Good straight
flight, good streamer deployment and
rocket landed well. |
|
| 4 |
|
Rocket |
|
Axion |
|
Pressure |
|
130 psi |
|
Nozzle |
|
15 mm |
|
Water |
|
1800 mL |
|
Flight Computer |
|
V1.5 setting: 4-F-C |
|
Payload |
|
Camera , altimeter |
|
Altitude / Time |
|
501' (152m) / 42.5
s |
|
Notes |
|
Straight
flight with a fast take off. Launched with a 1200mm
launch tube. Parachute suspended for
stable descent. Rocket drifted 320m
downrange. Camera failed to record
full flight. Good altimeter data. |
|
|