Each flight log entry usually
represents a launch or test day, and describes the
events that took place.
Click on an image to view a larger image, and
click the
browser's BACK button to return back to the
page.
Day 78 - Acceleron V First Flight
The ring brace in its mold. Waiting for the
glue to dry.
After the glue
dried ....
... it was wrapped with a layer of
fiberglass.
Here it is partially sanded and the mounting
brackets added.
One of the booster segments undergoing a
pressure test.
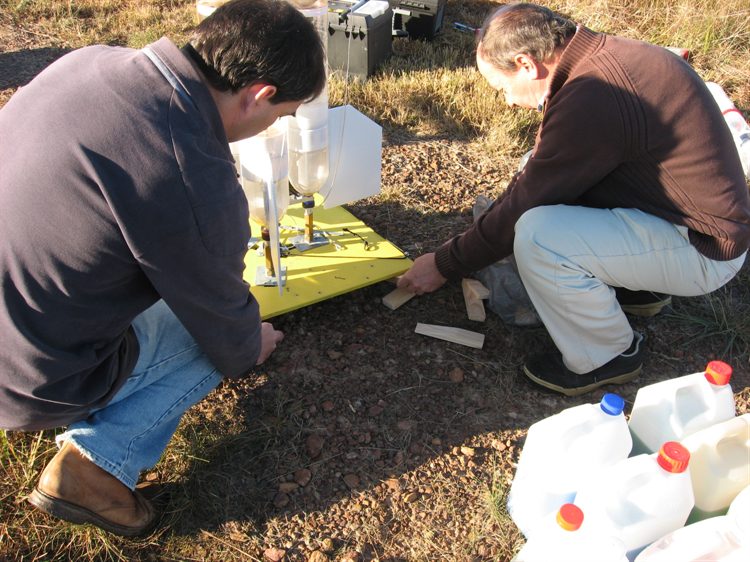
Pressure testing the baseplate to full
operating pressure (130psi)
Detail of Trevor's pressure switch (TDD2).
Location of the two flight computers.
Detail of the servo box and the staging
mechanism. With the foam spacer below.
Looking down the centerline of the booster.
Location of the two parachutes. The primary
is on the left and the secondary on the right.
The booster segments are held against the
foam brace by a nylon string. This allows the
bottles to expand under pressure.
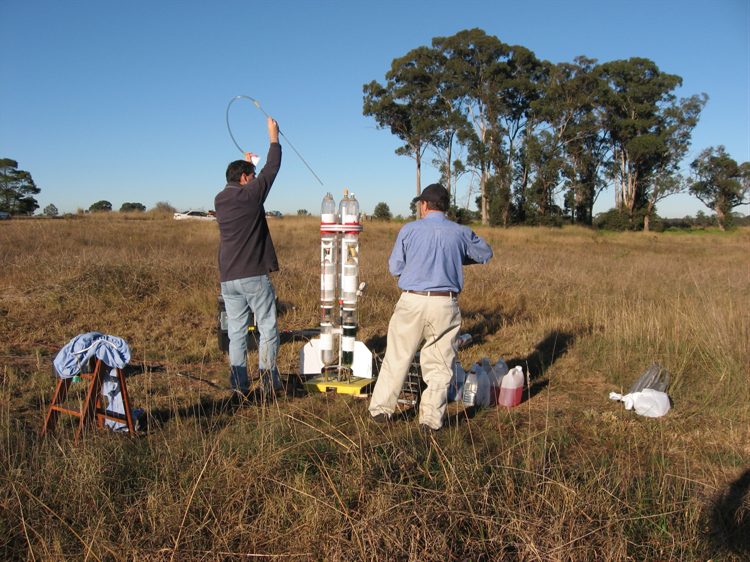
The new temporary layout at Doonside.
Leveling the launcher so that it points
vertically.
Filling through a long funnel to prevent
water entering the launcher's fill tubes.
3.2L of water went into each booster
segment.
Kinder surprise eggs make great pressure
switch covers.
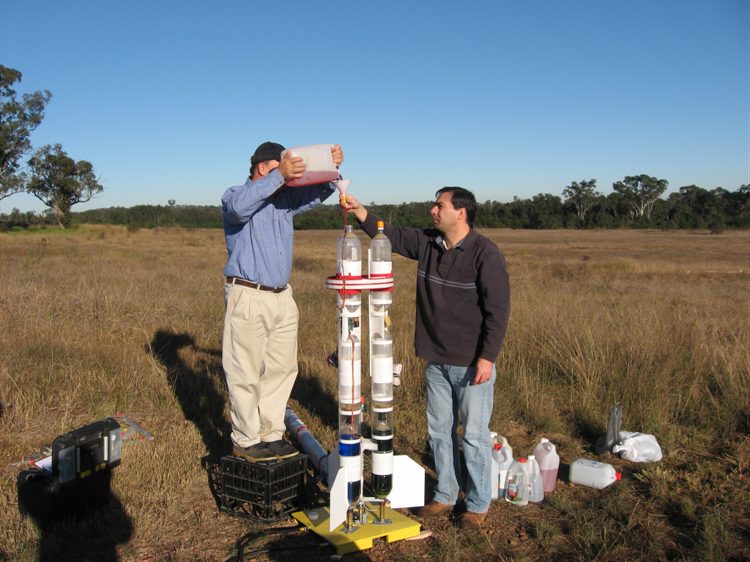
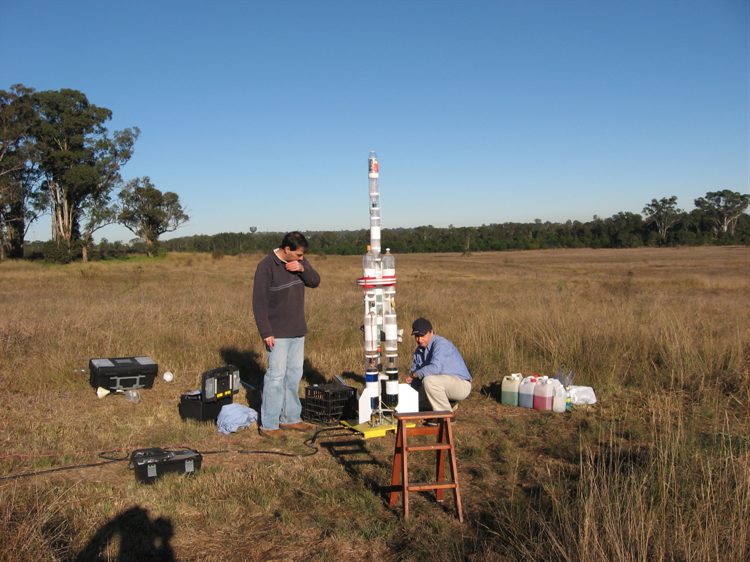
Preparing the sustainer for flight.
Filling the sustainer with 1800mL of foam
and water. A sun shade is draped over the
booster.
This was the first time we attempted to load
the sustainer into the booster while it was full
of water. It is a bit of a handful.
Now where did I put that checklist? .... ahh
there it is.
You can never be too careful when a rocket
is going up for the first time.
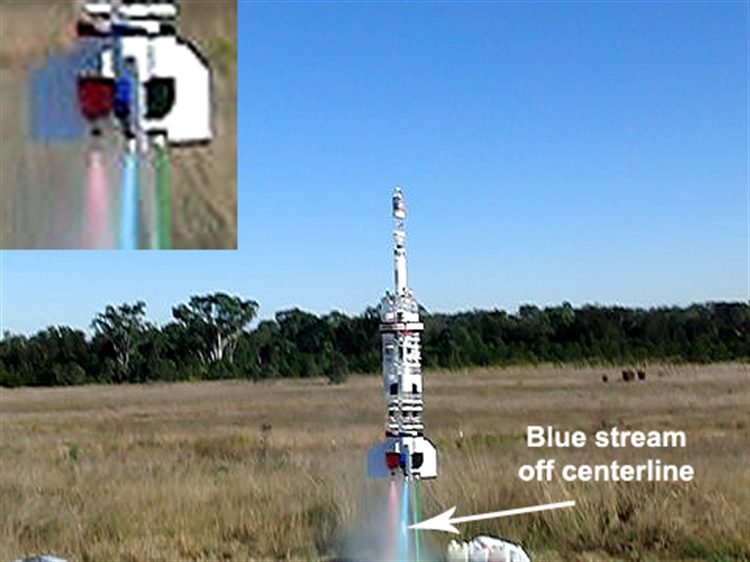
The flow from the blue nozzle clearly shows
that it is off-center.
This view shows the difference in flow from
the three nozzles.
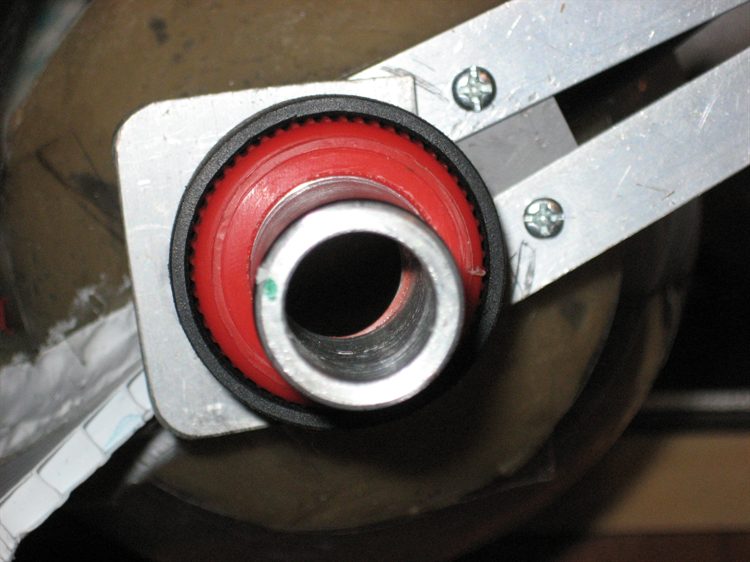
Detail of protruding internal seal on the
nozzle that showed turbulent flow. (discovered
after the flight)
Detail of the "blue" nozzle that also shows
the protruding seal. This nozzle appeared to
have an off-centerline thrust vector.
Booster altitude plot
You can see the team on the lower right.
Spray from staging.
The sustainer performs an 'S' manoeuvre
shortly after staging.
Sustainer altitude plot
A video frame shows that the primary
parachute did eventually deploy before landing.
Recovering the sustainer. The sustainer
suffered only minor damage...
... but the camera was totalled.
A few buckled bottles and a damaged
nosecone, but otherwise ok. The flight computer
and altimeter were fine.
Dad made this camera handle the night before
launch. The handle can be mounted on a tripod as
well.
It lets us hold the DV camera as well as the
new high speed camera and have them point at the
same place.
Paul's rockets (two on the right) being
loaded onto the pad.
Paul got to push the RED button to launch
his rocket.
Date:4th
July 2009(8am - 1:30pm)
Location:Doonside, NSW, Australia
Conditions:Clear skies, 17
degrees C, wind < 5km/h
Team Members at Event:PK,
GK, HK, AK, Paul K and John K.
After the long wait for
the weather to clear and the launch site becoming accessible we finally had a chance to
launch the Acceleron V booster with the Axion
IV sustainer. The conditions turned out to
be ideal. The previous week we went out to
the launch site to help with mowing and
clear an area for the launch pads. Since we
haven't done an update for a while I though
I'd include a little bit of what we have
been doing as well.
Acceleron V work
On
the left are images of the ring brace used
to hold the booster segments apart to give
enough clearance for the sustainer fins. The ring was wrapped with fiberglass
to give it the needed rigidity for surviving
a landing. We glued 6 mounting brackets that
align each of the booster
segments.
We tested each of the
bottle pairs to 130psi and held them there
for 2 minutes. Out of 18 spliced pairs we
made, only 10 were without any leaks at that
pressure. 9 of
these were fitted to the booster and we had
one spare in case we needed to swap it over.
We then assembled each
booster segment with the Tornado couplings
and tested each segment individually to
100psi to check for leaks.
We then pressure tested
the base plate and retention mechanism to
the full operating pressure to make sure it
did not buckle with all the booster segments
pressing up at the ends. Only 3 small ball bearings hold
down the force of the entire rocket.
Nozzles
During earlier testing
we found that a couple of the 13mm nozzles
leaked slightly when the rocket was
unpressurised. We are only talking a few
drops of water. The o-ring grooves were
fractionally too deep, and with the narrow
o-rings this is more of an issue. When the
boosters were pressurised the o-rings would
seal properly. Dad decided to fix the issue
and machined up a whole new set of nozzles.
We also decided against a guide rail for
this rocket as there was no convenient place
to secure it. We could have attached it to the
outside of one of the boosters, but it could
have caused more harm than good due to the
potential uneven drag on that side of the
rocket. The nozzles are quite long ~40mm and
the fill tubes were quite a tight fit, so in
the absence of a guide rail, the rocket
straying from vertical could potentially
wedge one of the nozzles on the fill tube
causing all sorts of chaos.
We machined out the top 30mm of the nozzle
to be about 15mm in diameter and the nozzle
hole itself by another 0.5mm. This allows
the nozzle to pivot more without seizing on
the fill tube. The 0.5mm increase to the
nozzle gives about 8% more cross sectional
area so we get a little more thrust on
take-off.
Fill tubes
Each booster segment
was supposed to be filled with 3.4L of
water, however, we found out that these
particular spliced pairs only held ~3.3L as
opposed to the 3.6L that some of our earlier
ones had. The problem was that the fill
tubes were very close to the top of the
water level and the air outlet holes would
have been under the water level. (The holes
have to be above the water level). The holes
are normally on the side of the fill tubes
to stop water going down into the air
manifold when the boosters are being filled.
We plugged these up and drilled new holes in
the top to get that extra couple of cm to
get the right amount of water into the
booster.
In order to stop the
tubes now being filled with water we used a
long funnel that filled the boosters from
the bottom. It turns out we had to use 3.2L
of water instead of 3.4L to stay below the
fill tube holes.
FlycamOne Cameras
I spent a bit of time looking into why
the Flycamone2 stops recording after a few
minutes/seconds. Many online forums have
discussed this issue and it seems to be
power related. Apparently the LiPo battery
(220mAh) is only marginal for what the
camera needs and if it is a little cold and
the battery is a little old then it just
does not have enough power and will stop
recording.
Of the two cameras, one records for a few
minutes on a full charge, and each
subsequent recording will be shorter and
shorter. The other cam was okay. I
attached the bad camera to its mounting
bracket and then connected a 4.8V battery -
(four AAA 900mA NiMH batteries from Jaycar)
to the bracket connector.
On a full charge of the external
batteries the camera then recorded fine for
16 minutes at which point I stopped the
test. We mounted the batteries and flycam to
the booster. The sustainer camera was going
to use the internal battery.
Flight Day Events
We set up the
launch pad in the area we cleared a week
earlier, well away from everyone. It
took about an hour to set up everything
as there are many things we must do to
get it ready. We now always use a
checklist so that we don't miss
anything.
This was going to
be the first test flight of the rocket
and since there was a lot of firsts for
us on it we really did not know how well
it was going to go.
We pressurised the
rocket to 130psi and launched.
The rocket took off
slowly at first and started pitching over. It was
flying horizontally by the time the
second stage fired. The separation
looked quite clean but the sustainer
performed a giant S manoeuvre before
heading towards the ground.
The booster managed
to open the secondary parachute before
landing and so the rocket landed on the
soft grass sideways without any damage.
The sustainer hit
the ground fairly hard, smashing the
Flycam into a few pieces, and bucking
the top two bottles. The flight computer
and the altimeter were okay. The camera
may be repairable.
We debated over
whether we try to launch it again as the
damage to the sustainer could have been
repaired. We had spare bottles and new
nosecone. In the end we decided against
it since we weren't so sure what had
happened at that stage, and the wind
started to pick up a little bit.
We also launched
Paul's "POD 2" (Praetor) pyro rocket a
couple of times on a C6-5. The rocket
was very stable during flight and had a
good recovery on both occasions. We also
flew his Thunderbee rocket on a 1/2A3-2.
It was a good flight, but broke a fin on
landing.
Analysis of the Flight
Booster
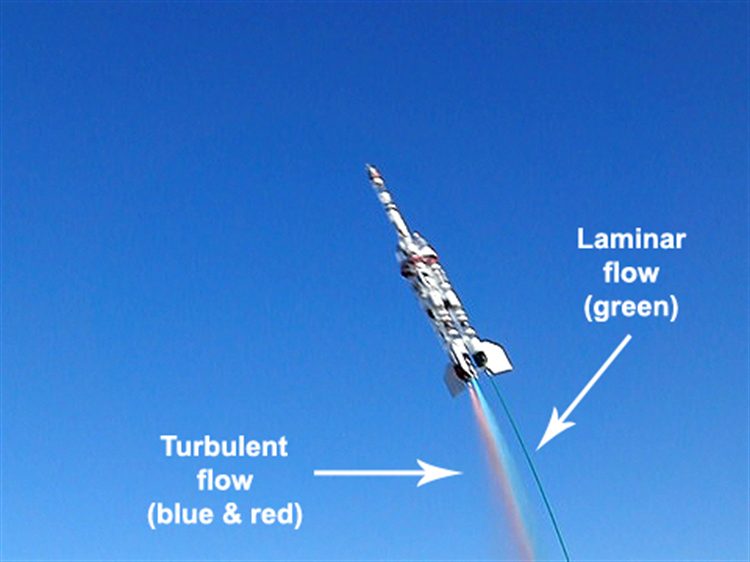
On review of the launch
videos we noticed that the column of water
coming out of the green nozzle showed very
nice laminar flow as would be expected. The
flow out of the other two nozzles was more
turbulent. The more turbulent flow usually
results in slightly lower thrust. So that
may have contributed to why the rocket
tilted in that direction.
The other
interesting thing revealed on the video was that
the blue water column appeared to not be
flowing inline with the rocket. This was
pretty unusual and the
resultant thrust vector also looks like it
was pushing the rocket in the direction it
was pitching over.
We inspected the
nozzles after the flight, and the only possible cause may
have been the rubber washer that seals the
nozzle. The red and blue nozzles had about 1
- 1.5mm overlap of the washer into the water
stream. I can understand that could have
perhaps resulted in the turbulent flow. It
is less clear how the blue nozzle thrust was
directed away from the centerline, unless
somehow the water was being deflected off
the inner wall of the nozzle. The green
nozzle that had the nice laminar flow showed
no sign of the protruding washer upon
inspection.
The washer may have
distorted when the nozzle was tightened
against the bottle and stretched into the
opening.
I checked the nozzle
alignment with a tight fitting dowel and it
was still lined up well. We are currently
treating the washer issue as the leading
cause of the pitch over manoeuvre. The
rocket is also a little tail heavy at lift
off so overall rocket stability may have
contributed to the problem.
We are not considering
uneven booster segment pressure as the cause
as the air pulse from all three nozzles
occurred at the same time.
It appears that the
pressure switch failed to trigger at the
right time on the primary computer. From the
staging timing (2.08 seconds after launch) and
the secondary parachute emerging first, it
appears that the backup secondary computer
saved the day, by releasing the second stage
and parachute before landing. From the video
it is evident that the primary parachute had
deployed before landing, but did not fully
open before the landing. The primary
staging servo was in the release position
when inspected after landing probably
indicating that it had triggered but late into
the flight.
Sustainer
It appears that the sustainer separated
cleanly from the booster, however, we are
putting it's wayward flight path down to two
issues.
1. Rocket was unstable due to: A combination
of small fins, small nozzle, a lot of water
and use of foam. The last three points make
the rocket tail heavy for a longer time during
the flight.
2. The booster also may have executed a classic "pit
manoeuvre" on the sustainer as it was
pitching over towards the ground. As the
sustainer was emerging from the booster the
tail may have been swung around by the
descending nose of the booster. That would
help explain why the sustainer flew upwards.
It is also unclear how the water was
distributed within the sustainer after a
horizontal coast period. The water may have
sloshed around inside the rocket during
staging upsetting the balance further.
Something that would be unlikely to happen
if it was going vertical.
The sustainer hit the ground 6.8
seconds after lift-off which was about 1.7
seconds before the parachute was due to
deploy. It actually landed before the
booster.
Conclusions
All in all we consider the test flight a
success. There were many firsts for us on
this flight and we learned a great deal
about what worked and what didn't.
Things we tried for the first time:
New small pressure
switch. This does not appear to have
worked well, although it did activate in
a later part of the flight.
Dual independent
systems. Worked well together for
backup. Saved the day in the end.
Staging mechanism
worked well to release the rocket.
Ring brace and
booster segments used for sustainer
support. Worked well to support the
sustainer even during a pitch manoeuvre.
Ring brace survived the landing well.
The booster was
stable in flight after all the water had
gone.
Acceleration was
high enough for the G-switch to trigger.
This was our
highest capacity rocket to date.
This was our
highest lift-off weight to date.
Our most complex
rocket with the most number of
individual components.
New baseplate
design for holding down the entire
rocket by a common point. This worked
well.
New parachute
deployment servo configuration. These
servos release the door directly without
the use of thread and pin. This worked
well.
Removable large fins.
These were taped to the rocket and held
up well to flight and landing
conditions.
Changes for Next Flight
We will attempt to fly the rocket again at
the next NSWRA launch event. The following changes
will be made to the rocket and launcher
before the next flight:
Narrower washers to
seal the nozzles so that they do not
intrude into the water stream.
New 15mm nozzles.
We will use the old nozzles with the o-ring groove
removed giving us a larger
nozzle. This should yield a faster take
off.
Create new nozzle
seats and fill tubes for the launcher.
These will seal the nozzles from the
inside rather than from the outside.
This will actually result in less
required hold down force.
We will add a guide
rail to the launcher.
Use less water in
the booster. Perhaps ~2.5L to reduce the
amount of time the rocket is tail heavy.
With the larger nozzles this will also empty
faster.
Mount the camera
further down in the sustainer.
Rebuild the
sustainer and increase the surface area
of the fins.
Reduce the amount
of water in the sustainer, perhaps down
to 1.3 liters. This again should help
reduce the amount of time the rocket
spends with a heavy tail.
Switch to the old
pressure switch we used on the earlier
Acceleron rockets.
Some of the information below is more for
our reference, as we also use these web
pages as our technical journal and refer
back during upcoming flights.
Flight Timeline
Time (s)
Event
T - 0
Launch
T+ 0.2
Launcher fill tubes exit
nozzles
T+ 1.01
Start of air-pulse
T+ 1.84
Booster stops producing
noise (no more pressure)
T+ 2.08
Staging
T+ 4.3
Secondary parachute first
visible emerging from rocket
T+ 5.44
Secondary parachute fully
opens
T+ 6.8
Sustainer impacts ground
T+ 7.4
Booster lands under
parachute
Flight computer
settings
V1.6
V1.6
V1.5
Primary
Secondary
Sustainer
0.
0
0.
0
0.
5
0.5 sec/step
1.
0
1.
2
2 secs
1.
A
5 secs
2.
1
0.1 secs
2.
0
2.
7
3.5 secs
3.
0
3.
0
3.
3
0.1 sec/step
4.
0
4.
0
4.
1
0.1 sec
5.
3
0.3 secs
5.
3
0.3 secs
5.
1
0.1 sec
6.
0
6.
0
6.
V
7.
V
7.
R
7.
0
8.
8
1.2 secs
8.
8
1.2 secs
8.
8
1.2 secs
9.
V
9.
V
9.
0
A.
0
A.
0
A.
V
B.
F
2.4 secs
B.
F
2.4 secs
B.
F
2.4 secs
C.
0
sound OFF
C.
0
sound OFF
C.
2
Sound ON
D.
0
D.
0
D.
4
E.
0
E.
0
E.
5
Launch Checklist
This is the check list we use for
launching Acceleron V.
Grease booster nozzles
Grease central nozzle, staging
mechanism and sustainer nozzle
Grease launch tubes and release head
Lock booster onto pad � DOUBLE CHECK
Fill booster segments with water
Cap segments and tighten caps
Connect pressure switch to connector
Cover pressure switch
Pack sustainer parachute
Fill sustainer with foam and water
Load sustainer into first stage
Lock into position with lever arm
Pack booster parachutes
Turn on primary flight computer
Turn on secondary flight computer
Turn on sustainer flight computer
Verify parachute servos and staging
servos are in default positions
CLEAR AREA
Pressurize to 20 psi
Verify SAFE-TO-ARM light is ON
Check for leaks, check air flowing
to sustainer through non-return valve
Level launcher if rocket is not
vertical
Turn on altimeter in sustainer and
start recording
Turn on altimeter in booster and
start recording
Turn on camera in sustainer and
start recording
Turn on camera in booster and start
recording
Start ground cameras and get
photography people ready
109' (33 m) Ac., 277'
(84 m) Ax. /
7.4secs(Ac), 6.8secs(Ax)
Notes
(Maiden flight).
Booster pitched over soon after
launch. Sustainer was successfully
released. Booster's parachute opened
just above the ground. Booster
landed without damage. Sustainer
performed S manoeuvre before
spearing into the ground. Bottle
damage, camera destroyed, altimeter
and flight computer survived.
2
Rocket
Pod 2 (Paul's)
Motor
C6-5
Altitude / Time
?
Notes
Good straight
flight, with very little roll.
Parachute deployed near apogee and
the rocket landed well. No damage.
3
Rocket
Thunder Bee Hero (Paul's)
Motor
1/2A3 - 2
Altitude / Time
?
Notes
Good straight
flight, streamer deployed a tad
early but the rocket landed well
near the pad. Fin partially broke
off. can be repaired
4
Rocket
Pod 2 (Paul's)
Motor
C6-5
Altitude / Time
?
Notes
Good straight
flight, with very little roll.
Parachute deployed well and the
rocket landed well without damage.
They had one of the cheapest ones available
on the net. We also bought the 8Gb Ultra II
card to go with it from them. I think they
must import it from Japan. The printed
manual was only in Japanese, but a CD with
the English version was included. They also
included a universal to Australian power
adapter for the charger. The camera was
approximately half the cost of some other Australian retailers.
The whole camera is pretty slim which was
very surprising for what it does.
We first tried the camera on some static
tests to see how well it would work:
As expected the 1000fps is pretty useless
due to its frame size, but the 210 and
420fps are quite good. You also need lots of
light for the high-speed shots otherwise the
image is grainy.
We also used the camera to film some of the
launches during the NSWRA launch day at
Doonside.
One of the nice things of the slow motion is
that camera shake is vastly improved because
it looks like slow panning.
Camera Handle
Dad made a great handle with a mounting
bracket for our DV camera and the new Casio
camera. It is aligned so that both
cameras point in the same direction. This
allows us to capture high speed video as
well as realtime video at the same time.