Each flight log entry usually
represents a launch or test day, and describes the
events that took place.
Click on an image to view a larger image, and
click the
browser's BACK button to return back to the
page.
Day 80 - A Different Perspective -
Investigating water behaviour in flight
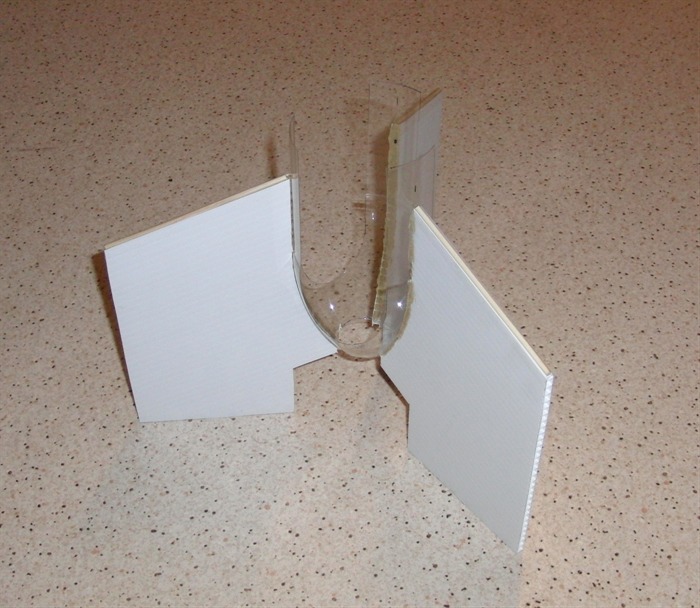
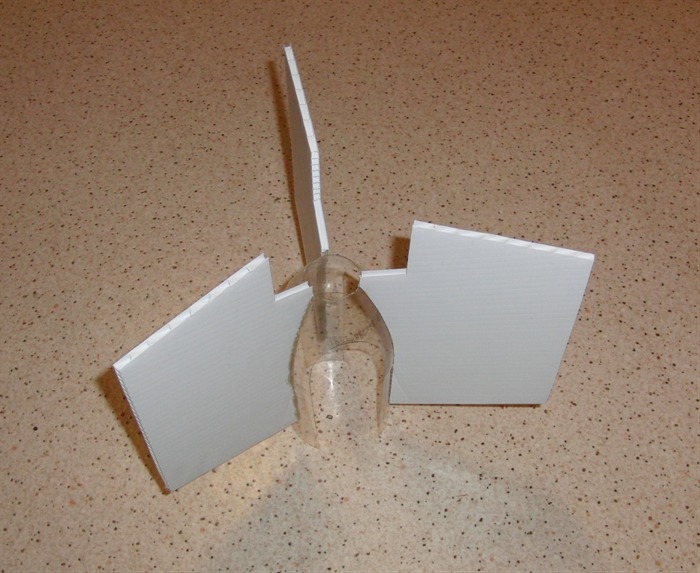
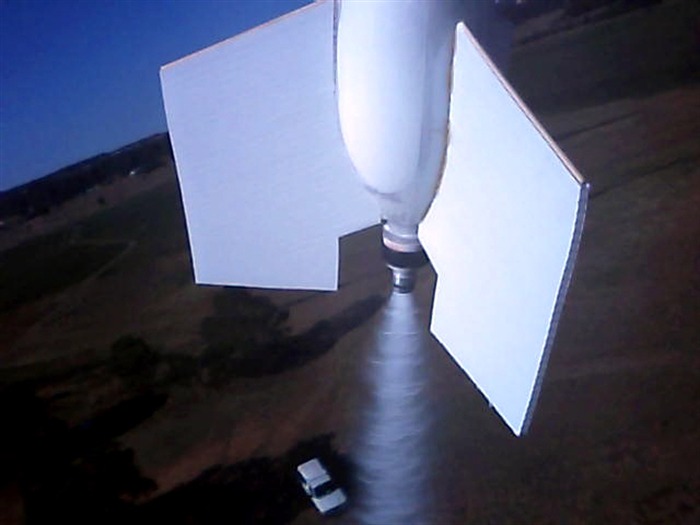
A new clear fin skirt
The fins do not have any fillets in order to
maximize the visibility of the bottle.
The fin skirt just slips over the neck of
the bottom bottle.
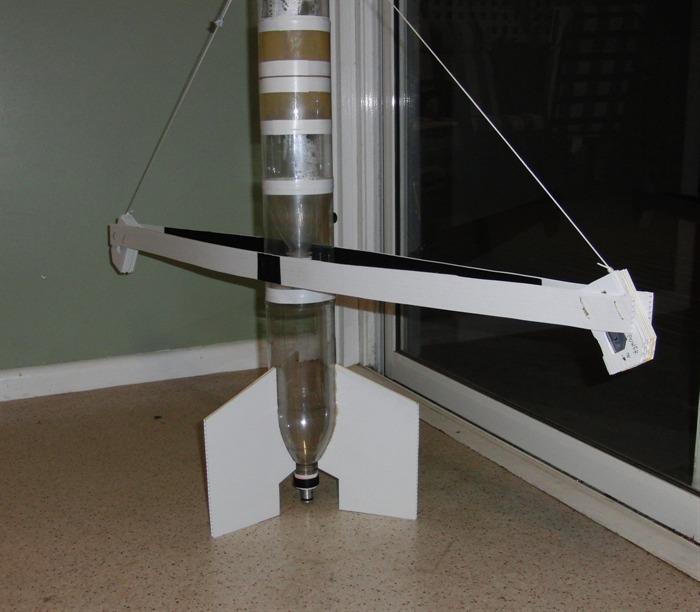
Axion IVd with camera boom.
A closer view of the boom.
The boom segments are reinforced with skewer
sticks which are glued inside the joint.
The tensioning string supports the boom to
stop it pivotting.
The MD80 camera is protected by a cover made
from corriflute plastic.
Top view of the boom.
140 grams of extra ballast (old
batteries)was used on the rocket to make sure it
remained stable in flight.
Setting up the launcher at Doonside.
You can see the new growth after a recent
grass fire.
Taking off with the assistance of a 2m guide
rail.
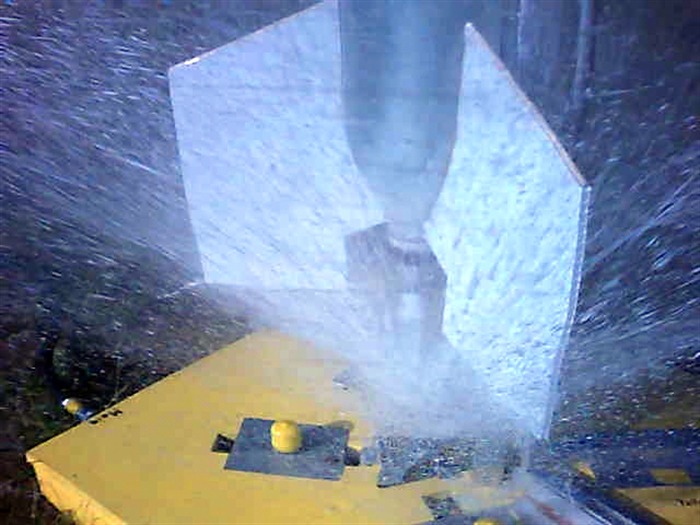
Luckily no water droplets hit the camera
lens.
Accelerating upwards.
Parachute deployment on the way down.
Paul's Pod 1 on its flight in high wind
conditions.
Date:13th
September 2009(8am - 12:00 pm)
Location:Doonside, NSW, Australia
Conditions:Warm in the morning turning hot
during the day 30C.Strong wind:
20-25km/h gusting to 35 km/h
Team Members at Event:GK, Paul K and John K.
We had a good day flying this weekend at
Doonside. It was the first Sunday launch for
NSWRA this year and the turnout was
reasonable. Due to the strong wind
conditions not a lot of rockets went up. Dad
being in Europe over the last few weeks we
didn't get a chance to launch the Acceleron
V rocket. It takes two cars to get out there
and both of us to set it up and launch it.
We'll try to launch it again at the next
opportunity.
A Different Perspective
One of the things we've wanted to
investigate over the last few months is how
water/foam behaves in the lowest bottle in
flight. Static tests are limited by the fact
that the water/foam inside the rocket is not
accelerated. Other than air pressure inside
the rocket, acceleration causes the water to
be forced towards the nozzle even more. An
early
observation showed that when using
Robinson couplings water was pushed up the
inside walls of the rocket as the air pulse
started.
Although it is a small amount, the weight
of the water is not being efficiently
utilised for maximum thrust. The main
question was: Does the acceleration of the
rocket cause this extra water to drain
properly or does it still move up the sides
during flight.
To try to answer this question we
modified one of our rockets by mounting a
long boom to the side of the rocket with a
camera at the end so that the camera could
look back at the lowest bottle and nozzle
spray. We used our new MD-80 camera for
that.
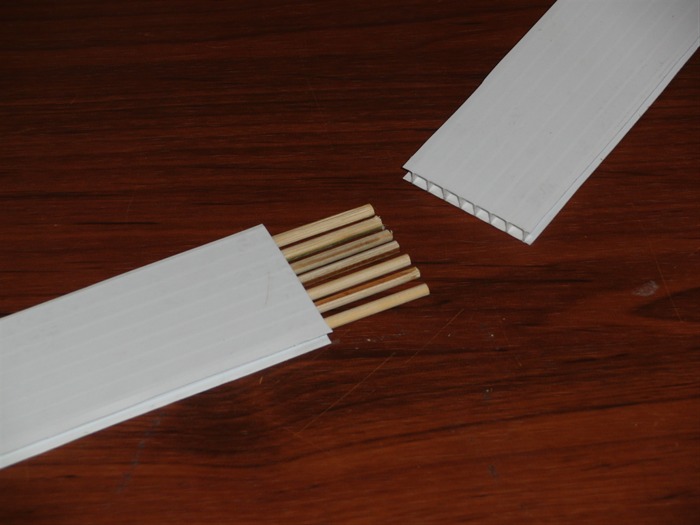
Boom
The boom was made from long strips of
Corriflute material. The boom extended the
same distance on both sides of the rocket.
The actual boom was made up of 4 strips of
Corriflute material joined together in pairs
by gluing bamboo skewers inside each channel
with PL premium. This gave the strips extra
strength where they were attached to the
rocket.
A counter weight was made for the other
side of the boom that had the same weight
and drag profile as the camera housing. The
housing was also made from strips of
corriflute material to hold the camera and
protect it during landing.
Two tensioning ropes were attached to
both the boom ends and around one of the
bottle necks further up the rocket body. The
tensioning mechanism was a tiny bent
aluminium plate like used on tents.
Extra Ballast
Because of all this extra weight near the
tail of the rocket, the Cg moved back about
200mm. Although the boom would act partially
as a fin, it would only do so in one
dimension, so there was potential that the
rocket could be unstable along the line of
the boom. So we added another 140grams of
ballast to the very nose of the rocket to
move the Cg back to where it should have
been.
We weren't concerned with any altitude
penalty on this flight. The rocket with
everything came in at just over 1Kg.
Fins
The fins were also specially made for
this experiment. We glued the fins to clear
section of bottle first. There were no
fillets on the fins to allow more of the
bottle to be seen. The fin skirt was then
slipped over the neck of the bottle and
attached with clear tape near the top of the
main bottle.
Launcher mods
Because of the long booms we could not
use our regular medium launcher. We slightly
modified the booster launcher to hold the 2m
guide rail closer to the release head. We
then glued guide rail buttons to the rocket.
The 2m guide rail was necessary to make sure
the rocket could build up enough speed for
the fins to keep the rocket flying straight.
Misc
We also used thermal covers over the
black Tornado couplings on this rocket in
the form of a roll of white paper cut out
from ordinary A4 printer paper.
The simulator predicted that the optimal
water fill would yield an acceleration of
around 2.1G for water only. This would have
meant closer to 1.5G for foam. We reduced
the optimal water amount to 1.4L which
raised the acceleration to over 3.2G.
Flight day report
We arrived at the launch site early
as there were strong wind predictions.
Since early mornings are usually the
calmest we wanted to get the launch in
early. Doonside has changed considerably
since our last visit. Most of the
construction dirt has been removed and
all the tall grass has been replaced by
new short growth after a large grass
fire that went through there a few weeks
ago. This makes locating rockets very
easy now.
Setup was quite straight forward
with Paul helping out quite a bit during
the preparation. He's becoming a quite a
good rocketeer. :)
We pressurised the rocket to 130psi
and launched. The rocket went up
straight without any problems and
pitched over into the strong breeze. The
parachute came out well after apogee and
the rocket landed well without issues.
The only casualty was that the ping pong
nose popped inside as the rocket landed
on the road. The parachute was tied a
little too far back which made the
rocket come down nose first. The boom
also gave the tail of the rocket extra
lift on the way down.
The camera recorded good video of
the flight, but I did forget to add food
colouring to the water to give a better
contrast. The other issue was that the
fins were too white which affected the
camera's auto iris when they were facing
the sun. This made the background
darker. For the next flight these should
be painted a dark colour.
We didn't fly a second flight
because by the time the data was
downloaded the wind had picked up and
was well over our launch criteria.
(20km/h)
We flew Paul's small Pod 1 water
rocket a couple of times to fill in the
time. The rocket flies well even in
higher wind conditions. Both were good
flights and both landed well.
What we learned
It was easy to see that the
water/foam was pushed up the sides even
during flight. This is good in some
respects in that ground static tests can
be used for evaluating solutions for
reducing the effect.
The long booms remained quite stable
during flight, allowing this camera
position to be used for other
experiments like looking up towards the
nose of the rocket.
The weight of the camera and the
counterweight on the ends of these long
booms also likely helped with rocket
spin control. (Kind of like a ballet
dancer spreading her arms out to slow
down her spin.) This approach could be
used for taking stable video while
looking out the side of the rocket.
Flight computer progress
I've spent quite a bit of time over the
recent weeks working on V1.7 and V2.0 of the
flight computers.
V1.7
The prototype for V1.7 is up and running
including the code. As components are
starting to trickle in from different
vendors, I've been working on the PCB layout
checking the physical clearances. The
current design has the PCB about half the
size of V1.6. I am also using 3.7g servos
for this design, and a small lightweight 6V
battery. The aim is to have the entire
package weigh around 20 grams, including the
servo, FC, G-switch and battery. The FC can
still be used with larger servos but then it
also needs bigger batteries.
V1.7 is aimed at simple operation and
primarily for parachute deployment, but it
can be used for staging as well.
V2.0
V2.0 is still in the circuit design stage
with some of the external modules still
being designed. I'm going to need to get
some input from the pyro guys about
designing the igniter side of the circuit so
that it is as safe as possible and reduces
the chances of false triggers.
V2.0 is being designed with both water
and pyro rockets in mind that carry more
complex payloads that need a certain amount
of control.
I've also started developing a simulator
application for V2.0 that allows
configuration for it to be tested before
programming the actual computer.